
8.E: Hamiltonian Mechanics (Exercises)




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
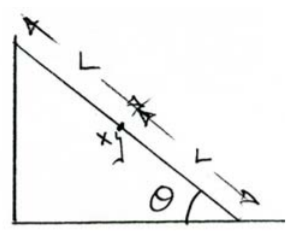
1. A block of mass m rests on an inclined plane making an angle θ with the horizontal. The inclined plane (a triangular block of mass M) is free to slide horizontally without friction. The block of mass m is also free to slide on the larger block of mass M without friction.
(a) Construct the Lagrangian function.
(b) Derive the equations of motion for this system.
(c) Calculate the canonical momenta.
(d) Construct the Hamiltonian function.
(e) Find which of the two momenta found in part (c) is a constant of motion and discuss why it is so. If the two blocks start from rest, what is the value of this constant of motion?
2. Discuss among yourselves the following four conditions that can exist for the Hamiltonian and give several examples of systems exhibiting each of the four conditions.
(a) The Hamiltonian is conserved and equals the total mechanical energy
(b) The Hamiltonian is conserved but does not equal the total mechanical energy
(c) The Hamiltonian is not conserved but does equal the total mechanical energy
(d) The Hamiltonian is not conserved and does not equal the mechanical total energy.
3. A block of mass m rests on an inclined plane making an angle θ with the horizontal. The inclined plane (a triangular block of mass M) is free to slide horizontally without friction. The block of mass m is also free to slide on the larger block of mass M without friction.
(a) Construct the Lagrangian function.
(b) Derive the equations of motion for this system.
(c) Calculate the canonical momenta.
(d) Construct the Hamiltonian function.
(e) Find which of the two momenta found in part (c) is a constant of motion and discuss why it is so. If the two blocks start from rest, what is the value of this constant of motion?
4. Discuss among yourselves the following four conditions that can exist for the Hamiltonian and give several examples of systems exhibiting each of the four conditions.
a) The Hamiltonian is conserved and equals the total mechanical energy
b) The Hamiltonian is conserved but does not equal the total mechanical energy
c) The Hamiltonian is not conserved but does equal the total mechanical energy
d) The Hamiltonian is not conserved and does not equal the mechanical total energy
5. Compare the Lagrangian formalism and the Hamiltonian formalism by creating a two-column chart. Label one side “ Lagrangian” and the other side “ Hamiltonian” and discuss the similarities and differences. Here are some ideas to get you started:
- What are the basic variables in each formalism?
- What are the form and number of the equations of motion derived in each case?
- How does the Lagrangian “state space” compare to the Hamiltonian “phase space”?
6. It can be shown that if L(q,˙q,t) is the Lagrangian of a particle moving in one dimension, then L=L′ where L′(q,˙q,t)=L(q,˙q,t)+dfdt and f(q,t) is an arbitrary function. This problem explores the consequences of this on the Hamiltonian formalism.
(a) Relate the new canonical momentum p′, for L′, to the old canonical momentum p, for L .
(b) Express the new Hamiltonian H′(q′,p′,t) for L′ in terms of the old Hamiltonian H(q,p,t) and f.
(c) Explicitly show that the new Hamilton’s equations for H′ are equivalent to the old Hamilton’s equations for H .
7. A massless hoop of radius R is rotating about an axis perpendicular to its central axis at constant angular velocity ω. A mass m can freely slide around the hoop.
(a) Determine the Lagrangian of the system.
(b) Determine the Hamiltonian of the system. Does it equal the total mechanical energy?
(c) Determine the Lagrangian of the system with respect to a coordinate frame in which H=T+Veff. What is V eff? What force generates the additional term in Veff ?
8. Consider a pendulum of length L attached to the end of rod of length R. The rod is rotating at constant angular velocity ω in the plane. Assume the pendulum is always taut.
(a) Determine equations of motion.
(b) For what value of ω2R is this system the same as a plane pendulum in a constant gravitational field?
(c) Show H≠E. What is the reason?
9. A particle of mass m in a gravitational field slides on the inside of a smooth parabola of revolution whose axis is vertical. Using the distance from the axis r, and the azimuthal angle φ as generalized coordinates, find the following.
(a) The Lagrangian of the system.
(b) The generalized momenta and the corresponding Hamiltonian
(c) The equation of motion for the coordinate r as a function of time.
(d) If dφdt=0, show that the particle can execute small oscillations about the lowest point of the paraboloid and find the frequency of these oscillations.
10. Consider a particle of mass m which is constrained to move on the surface of a sphere of radius R. There are no external forces of any kind acting on the particle.
(a) What is the number of generalized coordinates necessary to describe the problem?
(b) Choose a set of generalized coordinates and write the Lagrangian of the system.
(c) What is the Hamiltonian of the system? Is it conserved?
(d) Prove that the motion of the particle is along a great circle of the sphere.
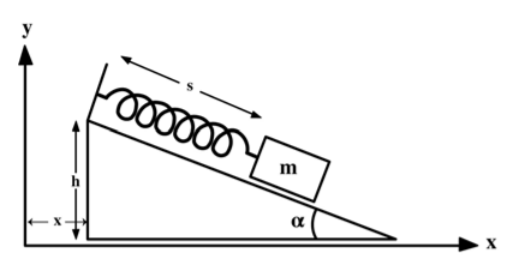
11. A block of mass m is attached to a wedge of mass M by a spring with spring constant k. The inclined frictionless surface of the wedge makes an angle α to the horizontal. The wedge is free to slide on a horizontal frictionless surface as shown in the figure.
(a) Given that the relaxed length of the spring is d, find the values s0 when both book and wedge are stationary.
(b) Find the Lagrangian for the system as a function of the x coordinate of the wedge and the length of spring s. Write down the equations of motion.
(c) What is the natural frequency of vibration?
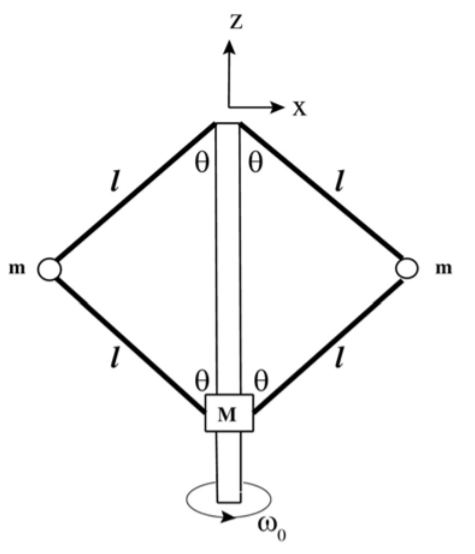
12. . A fly-ball governor comprises two masses m connected by 4 hinged arms of length l to a vertical shaft and to a mass M which can slide up or down the shaft without friction in a uniform vertical gravitational field as shown in the figure The assembly is constrained to rotate around the axis of the vertical shaft with same angular velocity as that of the vertical shaft. Neglect the mass of the arms, air friction, and assume that the mass M has a negligible moment of inertia. Assume that the whole system is constrained to rotate with a constant angular velocity ω0.
(a) Choose suitable coordinates and use the Lagrangian to derive equations of motion of the system around the equilibrium position.
(b) Determine the height z of the mass M above its lowest position as a function of ω0.
(c) Find the frequency of small oscillations about this steady motion.
(d) Derive a Routhian that provides the Hamiltonian in the rotating system.
(e) Is the total energy of the fly-ball governor in the rotating frame of reference constant in time?
(f) Suppose that the shaft and assembly are not constrained to rotate at a constant angular velocity ω0, that is, it is allowed to rotate freely at angular velocity ˙φ. What is the difference in the overall motion?
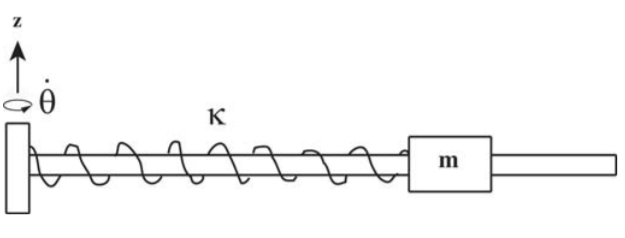
13. A rigid straight, frictionless, massless, rod rotates about the z axis at an angular velocity ˙θ. A mass m slides along the frictionless rod and is attached to the rod by a massless spring of spring constant κ.
(a) Derive the Lagrangian and the Hamiltonian
(b) Derive the equations of motion in the stationary frame using Hamiltonian mechanics.
(c) What are the constants of motion?
(d) If the rotation is constrained to have a constant angular velocity ˙θ=ω then is the non-cyclic Routhian Rnoncyclic=H−pθ˙θ a constant of motion, and does it equal the total energy?
(e) Use the non-cyclic Routhian Rnoncyclic to derive the radial equation of motion in the rotating frame of reference for the cranked system with ˙θ=ω.
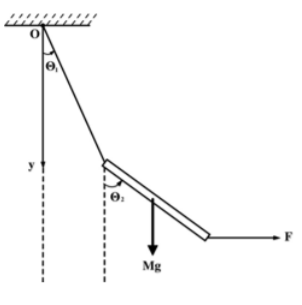
14. A thin uniform rod of length 2L and mass M is suspended from a massless string of length l tied to a nail. Initially the rod hangs vertically. A weak horizontal force F is applied to the rod’s free end.
(a) Write the Lagrangian for this system.
(b) For very short times such that all angles are small, determine the angles that string and the rod make with the vertical. Start from rest at t=0.
(c) Draw a diagram to illustrate the initial motion of the rod.
15. A uniform ladder of mass M and length 2L is leaning against a frictionless vertical wall with its feet on a frictionless horizontal floor. Initially the stationary ladder is released at an angle θ0=60∘ to the floor. Assume that gravitation field g=9.81m/s2 acts vertically downward and that the moment of inertia of the ladder about its midpoint is I=13ML2.
(a) Derive the Lagrangian
(b) Derive the Hamiltonian
(c) Explain if the Hamiltonian is conserved and/or if it equals the total energy
(d) Use the Lagrangian to derive the equations of motion
(e) Derive the angle θ at which the ladder loses contact with the vertical wall?
16. The classical mechanics exam induces Jacob to try his hand at bungee jumping. Assume Jacob’s mass m is suspended in a gravitational field by the bungee of unstretched length b and spring constant k. Besides the longitudinal oscillations due to the bungee jump, Jacob also swings with plane pendulum motion in a vertical plane. Use polar coordinates r,ϕ, neglect air drag, and assume that the bungee always is under tension.
(a) Derive the Lagrangian
(b) Determine Lagrange’s equation of motion for angular motion and identify by name the forces contributing to the angular motion.
(c) Determine Lagrange’s equation of motion for radial oscillation and identify by name the forces contributing to the tension in the spring.
(d) Derive the generalized momenta
(e) Determine the Hamiltonian and give all of Hamilton’s equations of motion.
2Recommended reading: "Classical Mechanics" H. Goldstein, Addison-Wesley, Reading (1950). The present chapter closely follows the notation used by Goldstein to facilitate cross-referencing and reading the many other textbooks that have adopted this notation.