
8.7: Variable-mass systems




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Lagrangian and Hamiltonian mechanics assume that the total mass and energy of the system are conserved. Variable-mass systems involve transferring mass and energy between donor and receptor bodies. However, such systems still can be conservative if the Lagrangian or Hamiltonian include all the active degrees of freedom for the combined donor-receptor system. The following examples of variable mass systems illustrate subtle complications that occur handling such problems using algebraic mechanics.
Rocket propulsion:
Newtonian mechanics was used to solve the rocket problem in chapter 2.12. The equation of motion (2.12.23) relating the rocket thrust Fex to the rate of change of the momentum separated into two terms,
Fex=˙py=m¨y+˙m˙y
The first term is the usual mass times acceleration, while the second term arises from the rate of change of mass times the velocity. The equation of motion for rocket motion is easily derived using either Lagrangian or Hamiltonian mechanics by relating the rocket thrust to the generalized force QEXCj.
Moving chains:
The motion of a flexible, frictionless, heavy chain that is falling in a gravitational field, often can be split into two coupled variable-mass partitions that have different chain-link velocities. These partitions are coupled at the moving intersection between the chain partitions. That is, these partitions share time-dependent fractions of the total chain mass. Moving chains were discussed first by Caley in 1857 and since then the moving chain problem has had a controversial history due to the frequent erroneous assumption that, in the gravitational field, the chain partitions fall with acceleration g rather than applying the correct energy conservation assumption for this conservative system. The following two examples of conservative falling-chain systems illustrate solutions obtained using variational principles applied to a single chain that is partitioned into two variable length sections.1
Consider the following two possible scenarios for motion of a flexible, heavy, frictionless, chain located in a uniform gravitational field g. The first scenario is the "folded chain" system which assumes that one end of the chain is held fixed, while the adjacent free end is released at the same altitude as the top of the fixed arm, and this free end is allowed to fall in the constant gravitational field g. The second "falling chain", scenario assumes that one end of the chain is hanging down through a hole in a frictionless, smooth, rigid, horizontal table, with the stationary partition of the chain sitting on the table surrounding the hole. The falling section of this chain is being pulled out of the stationary pile by the hanging partition. Both of these systems are conservative since it is assumed that the total mass of the chain is fixed, and no dissipative forces are acting. The chains are assumed to be inextensible, flexible, and frictionless, and subject to a uniform gravitational field g in the vertical y direction. In both examples, the chain, with mass M and length L, is partitioned into a stationary segment, plus a moving segment, where the mass per unit length of the chain is μ=ML. These partitions are strongly coupled at their intersection which propagates downward with time for the "folded chain" and propagates upward, relative to the lower end of the falling chain, for the "falling chain". For the "folded chain", the chain links are transferred from the moving segment to the stationary segment as the moving section falls. By contrast, for the "falling system", the chain links are transferred from the stationary upper section to the moving lower segment of the chain.
Example 8.7.1: Folded chain
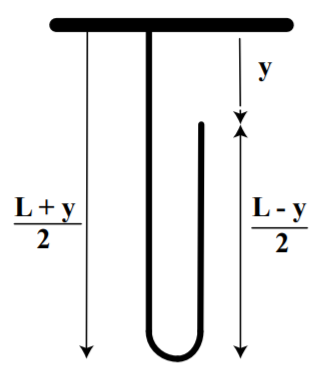
The folded chain of length L and mass-per-unit-length μ=ML hangs vertically downwards in a gravitational field g with both ends held initially at the same height. The fixed end is attached to a fixed support while the free end of the chain is dropped at time t=0 with the free end at the same height and adjacent to the fixed end. Let y be the distance the falling free end is below the fixed end. Using an idealized one-dimensional assumption, the Lagrangian L is given by
L(y,˙y)=M4L(L−y)˙y2+Mg14L(L2+2Ly−y2)
where the bracket in the second term is the height of the center of mass of the folded chain with respect to the fixed upper end of the chain.
The Hamiltonian is given by
H(y,pR)=pR˙y−L(y,˙y)=pRμ(L−y)−Mg(L2+2Ly−y2)4L
where pR is the linear momentum of the right-hand arm of the folded chain.
As shown in the discussion of the Generalized Energy Theorem, (chapters 7.8 and 7.9), when all the active forces are included in the Lagrangian and the Hamiltonian, then the total mechanical energy E is given by E=H. Moreover, both the Lagrangian and the Hamiltonian are time independent, since
dEdt=dHdt=−∂L∂t=0
Therefore the "folded chain" Hamiltonian equals the total energy, which is a constant of motion. Energy conservation for this system can be used to give
μ4(L−y)˙y2−14μg(L2+2Ly−y2)=−14μgL2 Solve for ˙y2 gives
˙y2=g(2Ly−y2)L−y
The acceleration of the falling arm, ¨y, is given by taking the time derivative of Equation ???
¨y=g+g(2Ly−y2)2(L−y)
The rate of change in linear momentum for the moving right side of the chain, ˙pR, is given by
˙pR=mR¨y+˙mR˙y=mRg+mRg(2Ly−y2)2(L−y)
For this energy-conserving chain, the tension in the chain T0 at the fixed end of the chain is given by
T0=μg2(L+y)+14μ˙y2
Equations ??? and ???, imply that the tension To diverges to infinity when y→L. Calkin and March measured the y dependence of the chain tension at the support for the folded chain and observed the predicted y dependence. The maximum tension was ≃ 25Mg, which is consistent with that predicted using Equation ??? after taking into account the finite size and mass of individual links in the chain. This result is very different from that obtained using the erroneous assumption that the right arm falls with the free-fall acceleration g, which implies a maximum tension T0= 2Mg. Thus the free-fall assumption disagrees with the experimental results, in addition to violating energy conservation and the tenets of Lagrangian and Hamiltonian mechanics. That is, the experimental result demonstrates unambiguously that the energy conservation predictions apply in contradiction with the erroneous free-fall assumption.
The unusual feature of variable mass problems, such as the folded chain problem, is that the rate of change of momentum in Equation ??? includes two contributions to the force and rate of change of momentum, that is, it includes both the acceleration term mR¨y plus the variable mass term ˙mR˙y that accounts for the transfer of matter at the intersection of the moving and stationary partitions of the chain. At the transition point of the chain, moving links are transferred from the moving section and are added to the stationary subsection. Since this moving section is falling downwards, and the stationary section is stationary, then the transferred momentum is in a downward direction corresponding to an increased effective downward force. Thus the measured acceleration of the moving arm actually is faster than g. A related phenomenon is the loud cracking sound heard when cracking a whip.
Example 8.7.2: Falling chain
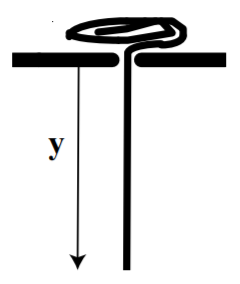
The "falling chain", scenario assumes that one end of the chain is hanging down through a hole in a frictionless, smooth, rigid, horizontal table, with the stationary partition of the chain lying on the frictionless table surrounding the hole. The falling section of this chain is being pulled out of the stationary pile by the hanging partition. The analysis for the problem of the falling chain behaves differently from the folded chain. For the "falling- chain" let y be the falling distance of the lower end of the chain measured with respect to the table top. The Lagrangian and Hamiltonian are given by L(y,˙y)=μ2y˙y2+μgy22py=∂L∂˙y=μy˙yH=p2y2μy−μgy22=E
The Lagrangian and Hamiltonian are not explicitly time dependent, and the Hamiltonian equals the initial total energy, E0. Thus energy conservation can be used to give that
E=12μy(˙y2−gy)=E0
Lagrange’s equation of motion gives ˙py=my¨y+˙my˙y=myg+12μ˙y2=Mg−T0
The important difference between the folded chain and falling chain is that the moving component of the falling chain is gaining mass with time rather than losing mass. Also the tension in the chain T0 reduces the acceleration of the falling chain making it less than the free-fall value g. This is in contrast to that for the folded chain system where the acceleration exceeds g.
The above discussion shows that Lagrangian and Hamiltonian can be applied to variable-mass systems if both the donor and receptor degrees of freedom are included to ensure that the total mass is conserved.
1Discussions with Professor Frank Wolfs stimulated inclusion of these two examples of moving chains.