
10.4: Rayleigh’s Dissipation Function




- Last updated
- Feb 28, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
As mentioned above, nonconservative systems involving viscous or frictional dissipation, typically result from weak thermal interactions with many nearby atoms, making it impractical to include a complete set of active degrees of freedom. In addition, dissipative systems usually involve complicated dependences on the velocity and surface properties that are best handled by including the dissipative drag force explicitly as a generalized drag force in the Euler-Lagrange equations. The drag force can have any functional dependence on velocity, position, or time.
Fdrag=−f(˙q,q,t)ˆv
Note that since the drag force is dissipative the dominant component of the drag force must point in the opposite direction to the velocity vector.
In 1881 Lord Rayleigh showed that if a dissipative force F depends linearly on velocity, it can be expressed in terms of a scalar potential functional of the generalized coordinates called the Rayleigh dissipation function R(˙q). The Rayleigh dissipation function is an elegant way to include linear velocity-dependent dissipative forces in both Lagrangian and Hamiltonian mechanics, as is illustrated below for both Lagrangian and Hamiltonian mechanics.
Generalized dissipative forces for linear velocity dependence
Consider n equations of motion for the n degrees of freedom, and assume that the dissipation depends linearly on velocity. Then, allowing all possible cross coupling of the equations of motion for qj, the equations of motion can be written in the form
n∑i=1[mij¨qj+bij˙qj+cijqj−Qi(t)]=0
Multiplying Equation ??? by ˙qi, take the time integral, and sum over i,j, gives the following energy equation n∑i=1n∑j=1∫t0mij¨qj˙qidt+n∑i=1n∑j=1∫t0bij˙qj˙qidt+n∑i=1n∑j=1∫t0cijqj˙qidt=n∑i∫t0Qi(t)˙qidt
The right-hand term is the total energy supplied to the system by the external generalized forces Qi(t) at the time t. The first time-integral term on the left-hand side is the total kinetic energy, while the third time-integral term equals the potential energy. The second integral term on the left is defined to equal 2R(˙q) where Rayeigh’s dissipation function R(˙q) is defined as
R(˙q)≡12n∑i=1n∑j=1bij˙qi˙qj
and the summations are over all n particles of the system. This definition allows for complicated cross-coupling effects between the n particles.
The particle-particle coupling effects usually can be neglected allowing use of the simpler definition that includes only the diagonal terms. Then the diagonal form of the Rayleigh dissipation function simplifies to
R(˙q)≡12n∑i=1bi˙q2i
Therefore the frictional force in the qi direction depends linearly on velocity ˙qi, that is
Ffqi=−∂R(˙q)∂˙qi=−bi˙qi
In general, the dissipative force is the velocity gradient of the Rayleigh dissipation function, Ff=−∇˙qR(˙q)
The physical significance of the Rayleigh dissipation function is illustrated by calculating the work done by one particle i against friction, which is
dWfi=−Ffi⋅dr=−Ffi⋅˙qidt=bi˙q2idt
2R(˙q)=dWfdt
which is the rate of energy (power) loss due to the dissipative forces involved. The same relation is obtained after summing over all the particles involved.
Transforming the frictional force into generalized coordinates requires equation (6.3.10)
˙ri=∑k∂ri∂qk˙qk+∂ri∂t
Note that the derivative with respect to ˙qk equals
∂˙ri∂˙qj=∂ri∂qj
Using equations (6.3.11) and 7.3.12, the j component of the generalized frictional force Qfj is given by Qfj=n∑i=1Ffi⋅∂ri∂qj=n∑i=1Ffi⋅∂˙ri∂˙qj=−n∑i=1∇viR(˙q)⋅∂˙ri∂˙qj=−∂R(˙q)∂˙qj
Equation ??? provides an elegant expression for the generalized dissipative force Qfj in terms of the Rayleigh’s scalar dissipation potential R.
Generalized dissipative forces for nonlinear velocity dependence
The above discussion of the Rayleigh dissipation function was restricted to the special case of linear velocity-dependent dissipation. Virga[Vir15] proposed that the scope of the classical Rayleigh-Lagrange formalism can be extended to include nonlinear velocity dependent dissipation by assuming that the nonconservative dissipative forces are defined by
Ffi=−∂R(q,˙q)∂˙q
where the generalized Rayleigh dissipation function R(q,˙q) satisfies the general Lagrange mechanics relation
δLδq−∂R∂˙q=0
This generalized Rayleigh’s dissipation function eliminates the prior restriction to linear dissipation processes, which greatly expands the range of validity for using Rayleigh’s dissipation function.
Lagrange equations of motion
Linear dissipative forces can be directly, and elegantly, included in Lagrangian mechanics by using Rayleigh’s dissipation function as a generalized force Qfj. Inserting Rayleigh dissipation function ??? in the generalized Lagrange equations of motion (6.5.12) gives
{ddt(∂L∂˙qj)−∂L∂qj}=[m∑k=1λk∂gk∂qj(q,t)+QEXCj]−∂R(q,˙q)∂˙qj
where QEXCj corresponds to the generalized forces remaining after removal of the generalized linear, velocity-dependent, frictional force Qfj.
The holonomic forces of constraint are absorbed into the Lagrange multiplier term.
Hamiltonian mechanics
If the nonconservative forces depend linearly on velocity, and are derivable from Rayleigh’s dissipation function according to Equation ???, then using the definition of generalized momentum gives
˙pi=ddt∂L∂˙qj=∂L∂qi+[m∑k=1λk∂gk∂qj(q,t)+QEXCj]−∂R(q,˙q)∂˙qj˙pi=−∂H(p,q,t)∂qi+[m∑k=1λk∂gk∂qj(q,t)+QEXCj]−∂R(q,˙q)∂˙qj
Thus Hamilton’s equations become
˙qi=∂H∂pi˙pi=−∂H∂qi+[m∑k=1λk∂gk∂qj(q,t)+QEXCj]−∂R(q,˙q)∂˙qj
The Rayleigh dissipation function R(q,˙q) provides an elegant and convenient way to account for dissipative forces in both Lagrangian and Hamiltonian mechanics.
Example 10.4.1: Driven, Linearly-Damped, Coupled Linear Oscillators
Consider the two identical, linearly damped, coupled oscillators (damping constant β) shown in the figure.
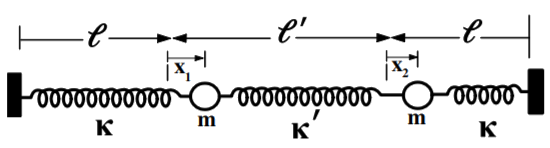
A periodic force F=F0cos(ωt) is applied to the left-hand mass m. The kinetic energy of the system is
T=12m(˙x21+˙x22)
U=12κx21+12κx22+12κ′(x2−x1)2=12(κ+κ′)x21+12(κ+κ′)x22−κ′x1x2
Thus the Lagrangian equals L=12m(˙x21+˙x22)−[12(κ+κ′)x21+12(κ+κ′)x22−κ′x1x2]
Since the damping is linear, it is possible to use the Rayleigh dissipation function
R=12β(˙x21+˙x22)
The applied generalized forces are
Q′1=Focos(ωt)Q′2=0
Use the Euler-Lagrange equations ??? to derive the equations of motion
{ddt(∂L∂˙qj)−∂L∂qj}+∂F∂˙qj=Q′j+m∑k=1λk∂gk∂qj(q,t)
These two coupled equations can be decoupled and simplified by making a transformation to normal coordinates, η1,η2 where
η1=x1−x2η2=x1+x2
Thus x1=12(η1+η2)x2=12(η2−η1)
Insert these into the equations of motion gives
m(¨η1+¨η2)+β(˙η1+˙η2)+(κ+κ′)(η1+η2)−κ′(η2−η1)=2F0cos(ωt)m(η2−η1)+β(η2−η1)+(κ+κ′)(η2−η1)−κ′(η1+η2)=0
Add and subtract these two equations gives the following two decoupled equations
¨η1+βm˙η1+(κ+2κ′)mη1=F0mcos(ωt)¨η2+βm˙η2+κmη2=F0mcos(ωt)
Define Γ=βm,ω1=√(κ+2κ′)m,ω2=√κm,A=F0m. Then the two independent equations of motion become
¨η1+Γ˙η1+ω21η1=Acos(ωt)¨η2+Γ˙η2+ω22η2=Acos(ωt)
This solution is a superposition of two independent, linearly-damped, driven normal modes η1 and η2 that have different natural frequencies ω1 and ω2. For weak damping these two driven normal modes each undergo damped oscillatory motion with the η1 and η2 normal modes exhibiting resonances at ω′1=√ω21−2(Γ2)2 and ω′2=√ω22−2(Γ2)2
Example 10.4.2: Kirchhoff’s Rules for Electrical Circuits
The mathematical equations governing the behavior of mechanical systems and LRC electrical circuits have a close similarity. Thus variational methods can be used to derive the analogous behavior for electrical circuits. For example, for a system of n separate circuits, the magnetic flux Φik through circuit i, due to electrical current Ik=˙qk flowing in circuit k, is given by
Φik=Mik˙qk
where Mik is the mutual inductance. The diagonal term Mii=Li corresponds to the self inductance of circuit i. The net magnetic flux Φi through circuit i, due to all n circuits, is the sum
Φi=n∑k=1Mik˙qk
Thus the total magnetic energy Wmag,which is analogous to kinetic energy T, is given by summing over all n circuits to be Wmag=T=12n∑i=1n∑k=1Mik˙qi˙qk
Similarly the electrical energy Welect stored in the mutual capacitance Cik between the n circuits, which is analogous to potential energy, U, is given by
Welect=U=12n∑i=1n∑k=1qiqkCik
Thus the standard Lagrangian for this electric system is given by
L=T−U=12n∑i=1n∑k=1[Mik˙qi˙qk−qiqkCik]
Assuming that Ohm’s Law is obeyed, that is, the dissipation force depends linearly on velocity, then the Rayleigh dissipation function can be written in the form
R≡12n∑i=1n∑k=1Rik˙qi˙qk
where Rik is the resistance matrix. Thus the dissipation force, expressed in volts, is given by
Fi=−∂R∂˙qj=12n∑k=1Rik˙qk
Inserting equations α, β, and γ into Equation ???, plus making the assumption that an additional generalized electrical force Qi=ξi(t) volts is acting on circuit i, then the Euler-Lagrange equations give the following equations of motion.
n∑k=1[Mik¨qk+Rik˙qk+qkCik]=ξi(t)
This is a generalized version of Kirchhoff’s loop rule which can be seen by considering the case where the diagonal term i=k is the only non-zero term. Then
[Mii¨qi+Rii˙qi+qiCii]=ξi(t)
This sum of the voltages is identical to the usual expression for Kirchhoff’s loop rule. This example illustrates the power of variational methods when applied to fields beyond classical mechanics.