
11.2: Equivalent one-body Representation for two-body motion
- Page ID
- 9615

The motion of two bodies, \(1\) and \(2\), interacting via two-body central forces, requires \(6\) spatial coordinates, that is, three each for \(\mathbf{r}_{1}\) and \(\mathbf{r}_{2}\). Since the two-body central force only depends on the relative separation \(\mathbf{r=r}_{1}-\mathbf{r}_{2}\) of the two bodies, it is more convenient to separate the \(6\) degrees of freedom into \(3\) spatial coordinates of relative motion \(\mathbf{r,}\) plus \(3\) spatial coordinates for the center-of-mass location \(\mathbf{R}\) as described in chapter \(2.7\). It will be shown here that the equation of motion for relative motion of the two-bodies in the center of mass can be represented by an equivalent one-body problem which simplifies the mathematics.
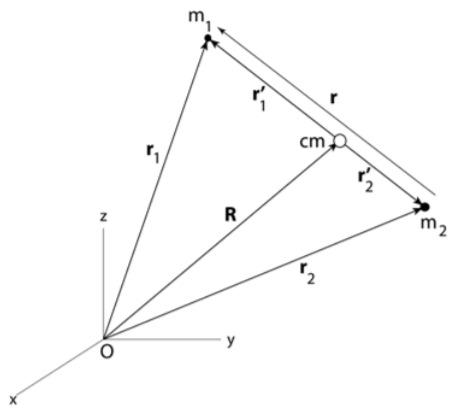
Consider two bodies acted upon by a conservative two-body central force, where the position vectors \(\mathbf{r} _{1}\) and \(\mathbf{r}_{2}\) specify the location of each particle as illustrated in Figure \(\PageIndex{1}\). An alternate set of six variables would be the three components of the center of mass position vector \(\mathbf{R}\) and the three components specifying the difference vector \(\mathbf{r}\) defined by Figure \(\PageIndex{1}\). Define the vectors \(\mathbf{r}_{1}^{\prime }\) and \(\mathbf{r} _{2}^{\prime }\) as the position vectors of the masses \(m_{1}\) and \(m_{2}\) with respect to the center of mass. Then
\[\begin{align} \label{11.3} \mathbf{r}_{1} &=&\mathbf{R}+\mathbf{r}_{1}^{\prime } \\ \mathbf{r}_{2} &=&\mathbf{R}+\mathbf{r}_{2}^{\prime } \notag\end{align}\]
By the definition of the center of mass
\[\mathbf{R}= \frac{m_{1}\mathbf{r}_{1}+m_{2}\mathbf{r}_{2}}{m_{1}+m_{2}}\]
and
\[m_{1}\mathbf{r}_{1}^{\prime }+m_{2}\mathbf{r}_{2}^{\prime }=0\]
so that
\[-\frac{m_{1}}{m_{2}}\mathbf{r}_{1}^{\prime }=\mathbf{r}_{2}^{\prime }\]
Therefore
\[\mathbf{r}=\mathbf{r}_{1}^{\prime }-\mathbf{r}_{2}^{\prime }=\frac{ m_{1}+m_{2}}{m_{2}}\mathbf{r}_{1}^{\prime }\]
that is,
\[\mathbf{r}_{1}^{\prime }=\frac{m_{2}}{m_{1}+m_{2}}\mathbf{r}\]
Similarly;
\[\mathbf{r}_{2}^{\prime }=-\frac{m_{1}}{m_{1}+m_{2}}\mathbf{r}\]
Substituting these into Equation \ref{11.3} gives
\[\begin{align} \mathbf{r}_{1} &=&\mathbf{R}+\mathbf{r}_{1}^{\prime }=\mathbf{R}+\frac{m_{2} }{m_{1}+m_{2}}\mathbf{r} \notag \\ \mathbf{r}_{2} &=&\mathbf{R}+\mathbf{r}_{2}^{\prime }=\mathbf{R}-\frac{m_{1} }{m_{1}+m_{2}}\mathbf{r} \label{11.10} \end{align} \]
That is, the two vectors \(\mathbf{r}_{1},\mathbf{r}_{2}\) are written in terms of the position vector for the center of mass \(\mathbf{R}\) and the position vector \(\mathbf{r}\) for relative motion in the center of mass frame.
Assuming that the two-body central force is conservative and represented by \(U(r)\), then the Lagrangian of the two-body system can be written as
\[L=\frac{1}{2}m_{1}\left\vert \mathbf{\dot{r}}_{1}\right\vert ^{2}+\frac{1}{2} m_{2}\left\vert \mathbf{\dot{r}}_{2}\right\vert ^{2}-U(r)\]
Differentiating equations \ref{11.10}, with respect to time, and inserting them into the Lagrangian, gives
\[L=\frac{1}{2}M\left\vert \mathbf{\dot{R}}\right\vert ^{2}+\frac{1}{2}\mu \left\vert \mathbf{\dot{r}}\right\vert ^{2}-U(r)\]
where the total mass \(M\) is defined as
\[M=m_{1}+m_{2}\]
and the reduced mass \(\mu\) is defined by
\[\mu \equiv \frac{m_{1}m_{2}}{m_{1}+m_{2}}\]
or equivalently \[\frac{1}{\mu }=\frac{1}{m_{1}}+\frac{1}{m_{2}}\]
The total Lagrangian can be separated into two independent parts
\[L=\frac{1}{2}M\left\vert \mathbf{\dot{R}}\right\vert ^{2}+L_{cm}\]
where
\[L_{cm}=\frac{1}{2}\mu \left\vert \mathbf{\dot{r}}\right\vert ^{2}-U(r)\]
Assuming that no external forces are acting, then \(\frac{\partial L}{ \partial \mathbf{R}}=0\) and the three Lagrange equations for each of the three coordinates of the \(\mathbf{R}\) coordinate can be written as
\[\frac{d}{dt}\frac{\partial L}{\partial \mathbf{\dot{R}}}=\frac{d\mathbf{P} _{cm}}{dt}=0\]
That is, for a pure central force, the center-of-mass momentum \(\mathbf{P} _{cm\text{ }}\)is a constant of motion where \[\mathbf{P}_{cm}=\frac{\partial L}{\partial \mathbf{\dot{R}}}=M\mathbf{\dot{R} }\]
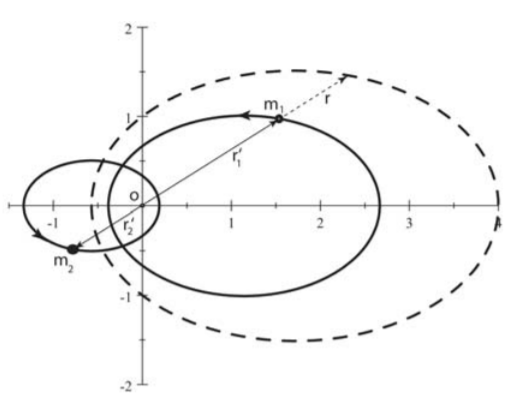
It is convenient to work in the center-of-mass frame using the effective Lagrangian \(L_{cm}\). In the center-of-mass frame of reference, the translational kinetic energy \(\frac{1}{2}M\left\vert \mathbf{\dot{R}}\right\vert ^{2}\) associated with center-of-mass motion is ignored, and only the energy in the center-of-mass is considered. This center-of-mass energy is the energy involved in the interaction between the colliding bodies. Thus, in the center-of-mass, the problem has been reduced to an equivalent one-body problem of a mass \(\mu\) moving about a fixed force center with a path given by \(\mathbf{r}\) which is the separation vector between the two bodies, as shown in figure \(\PageIndex{2}\). In reality, both masses revolve around their center of mass, also called the barycenter, in the center-of-mass frame as shown in Figure \(\PageIndex{2}\). Knowing \(\mathbf{r}\ \)allows the trajectory of each mass about the center of mass \(\mathbf{r}_{1}^{\prime }\) and \(\mathbf{r} _{2}^{\prime }\) to be calculated. Of course the true path in the laboratory frame of reference must take into account both the translational motion of the center of mass, in addition to the motion of the equivalent one-body representation relative to the barycenter. Be careful to remember the difference between the actual trajectories of each body, and the effective trajectory assumed when using the reduced mass which only determines the relative separation \(\mathbf{r}\) of the two bodies. This reduction to an equivalent one-body problem greatly simplifies the solution of the motion, but it misrepresents the actual trajectories and the spatial locations of each mass in space. The equivalent one-body representation will be used extensively throughout this chapter.