
11.3: Angular Momentum




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Angular momentum L
The notation used for the angular momentum vector is L where the magnitude is designated by |L|= l. Be careful not to confuse the angular momentum vector L with the Lagrangian Lcm. Note that the angular momentum for two-body rotation about the center of mass with angular velocity ω is identical when evaluated in either the laboratory or equivalent two-body representation. That is, using equations (11.2.6) and (11.2.7) L=m1r′21ω+m2r′22ω=μr2ω
The center-of-mass Lagrangian leads to the following two general properties regarding the angular momentum vector L.
1) The motion lies entirely in a plane perpendicular to the fixed direction of the total angular momentum vector. This is because
L⋅r=r×p⋅r=0
that is, the radius vector is in the plane perpendicular to the total angular momentum vector. Thus, it is possible to express the Lagrangian in polar coordinates, (r,ψ) rather than spherical coordinates. In polar coordinates the center-of-mass Lagrangian becomes Lcm=12μ(˙r2+r2˙ψ2)−U(r)
2) If the potential is spherically symmetric, then the polar angle ψ is cyclic and therefore Noether’s theorem gives that the angular momentum pψ≡L=r×p is a constant of motion. That is, since ∂Lcm∂ψ=0, then the Lagrange equations imply that
˙pψ=ddt∂Lcm∂˙ψ=0
where the vectors ˙pψ and ˙ψ imply that Equation ??? refers to three independent equations corresponding to the three components of these vectors. Thus the angular momentum pψ, conjugate to ψ, is a constant of motion. The generalized momentum pψ is a first integral of the motion which equals
pψ=∂Lcm∂˙ψ=μr2˙ψ=ˆpψl
where the magnitude of the angular momentum l, and the direction ˆpψ, both are constants of motion.
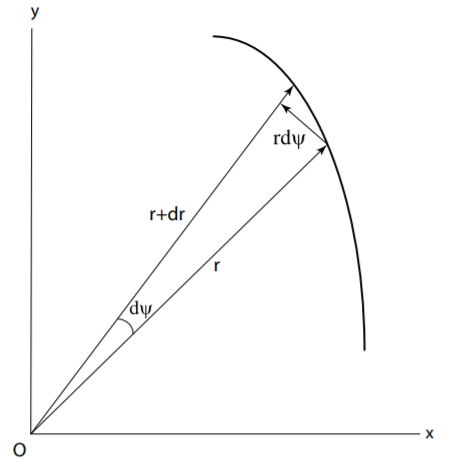
A simple geometric interpretation of Equation ??? is illustrated in Figure 11.3.1. The radius vector sweeps out an area dA in time dt where
dA=12r×vdt
and the vector A is perpendicular to the x−y plane. The rate of change of area is
dAdt=12r×v
But the angular momentum is
L=r×p=μr×v=2μdAdt
Thus the conservation of angular momentum implies that the areal velocity dAdt also is a constant of motion. This fact is called Kepler’s second law of planetary motion which he deduced in 1609 based on Tycho Brahe’s 55 years of observational records of the motion of Mars. Kepler’s second law implies that a planet moves fastest when closest to the sun and slowest when farthest from the sun. Note that Kepler’s second law is a statement of the conservation of angular momentum which is independent of the radial form of the central potential.