
12.13: Foucault pendulum
- Page ID
- 14145

A classic example of motion in non-inertial frames is the rotation of the Foucault pendulum on the surface of the earth. The Foucault pendulum is a spherical pendulum with a long suspension that oscillates in the \(x-y\) plane with sufficiently small amplitude that the vertical velocity \(\dot{z}\) is negligible.
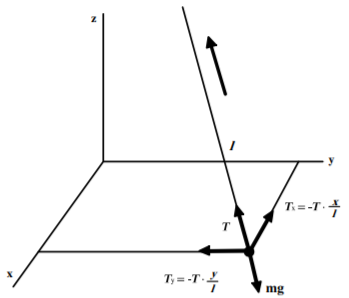
Assume that the pendulum is a simple pendulum of length \(l\) and mass \(m\) as shown in Figure \(\PageIndex{1}\). The equation of motion is given by
\[\mathbf{\ddot{r}} = \mathbf{g} + \frac{\mathbf{T}}{m} − 2\boldsymbol{\Omega} \times \mathbf{\dot{r}} \]
where \(\frac{T}{m}\) is the acceleration produced by the tension in the pendulum suspension and the rotation vector of the earth is designated by \(\boldsymbol{\Omega}\) to avoid confusion with the oscillation frequency of the pendulum \(\omega \). The effective gravitational acceleration \(\mathbf{g}\) is given by
\[\mathbf{g} = \mathbf{g}_0 − \boldsymbol{\Omega} \times [\boldsymbol{\Omega} \times (\mathbf{r} + \mathbf{R})] \label{12.78}\]
that is, the true gravitational field \(\mathbf{g}_0\) corrected for the centrifugal force.
Assume the small angle approximation for the pendulum deflection angle \(\beta\), then \(T_z = T \cos \beta \simeq T\) and \(T_z = mg\), thus \(T \simeq mg\). Then has shown in Figure \(\PageIndex{1}\), the horizontal components of the restoring force are
\[T_z = −mg \frac{x}{l} \]
\[T_y = −mg \frac{y}{l} \]
Since \(\mathbf{g}\) is vertical, and neglecting terms involving \(\dot{z}\), then evaluating the cross product in Equation \ref{12.78} simplifies to
\[\ddot{x} = −g\frac{x}{l} + 2\dot{y}\Omega \cos \theta \label{12.81} \]
\[\ddot{y} = −g\frac{y}{l} + 2\dot{x}\Omega \cos \theta \label{12.82} \]
where \(\theta\) is the colatitude which is related to the latitude \(\lambda\) by
\[\cos \theta = \sin \lambda \]
The natural angular frequency of the simple pendulum is
\[\omega_0 = \sqrt{\frac{g}{l}}\]
while the \(z\) component of the earth’s angular velocity is
\[\Omega_z = \Omega \ cos \theta \]
Thus equations \ref{12.81} and \ref{12.82} can be written as
\[\begin{align} \notag \ddot{x} - 2\Omega_z \dot{y} + \omega^2_0 x = 0 \\ \ddot{y} - 2\Omega_z \dot{x} + \omega^2_0 y = 0 \label{12.86} \end{align}\]
These are two coupled equations that can be solved by making a coordinate transformation.
Define a new coordinate that is a complex number
\[\eta = x + iy \]
Multiply the second of the coupled equations \ref{12.86} by \(i\) and add to the first equation gives
\[(\ddot{x} + i \ddot{y})+2i\Omega_z (\dot{x} + i\dot{y}) + \omega^2_0 (x + iy)=0 \notag\]
which can be written as a differential equation for \(\eta\)
\[\ddot{\eta} + 2i\Omega_z \dot{\eta} + \omega^2_0 \eta = 0 \label{12.88}\]
Note that the complex number \(\eta\) contains the same information regarding the position in the \(x−y\) plane as equations \ref{12.86}. The plot of \(\eta\) in the complex plane, the Argand diagram, is a birds-eye view of the position coordinates \((x,y)\) of the pendulum. This second-order homogeneous differential equation has two independent solutions that can be derived by guessing a solution of the form
\[\eta (t) = A_e^{−i\alpha t} \label{12.89}\]
Substituting Equation \ref{12.89} into \ref{12.88} gives that
\[\alpha^2 − 2\Omega_z \alpha − \omega^2_o = 0 \notag\]
That is
\[\alpha = \Omega_z \pm\sqrt{\Omega^2_z + \omega^2_0}\]
If the angular velocity of the pendulum \(\omega_0 \gg \Omega\), then
\[\alpha \simeq \Omega_Z \pm \omega_0 \]
Thus the solution is of the form
\[\eta (t) = e^{−i\Omega_zt} (A_+ e^{i\omega_0 t} + A_- e^{i\omega_0 t} ) \]
This can be written as
\[\eta (t) = Ae^{−i\Omega_z t} \cos(\omega_0 t + \delta) \]
where the phase \(\delta\) and amplitude \(A\) depend on the initial conditions. Thus the plane of oscillation of the pendulum is defined by the ratio of the \(x\) and \(y\) coordinates, that is the phase angle \(i\Omega_z t\). This phase angle rotates with angular velocity \(\Omega_z\) where
\[\Omega_z = \Omega \cos \theta = \Omega \sin \lambda \]
At the north pole the earth rotates under the pendulum with angular velocity \(\Omega\) and the axis of the pendulum is fixed in an inertial frame of reference. At lower latitudes, the pendulum precesses at the lower angular frequency \(\Omega_z = \Omega \sin \lambda\) that goes to zero at the equator. For example, in Rochester, NY, \(\lambda = 43^{\circ} N\), and therefore a Foucault pendulum precesses at \(\Omega_Z = 0.682\Omega \). That is, the pendulum precesses \(245.5^{\circ}\)/day.