
13.8: Parallel-Axis Theorem




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
The values of the components of the inertia tensor depend on both the location and the orientation about which the body rotates relative to the body-fixed coordinate system. The parallel-axis theorem is valuable for relating the inertia tensor for rotation about parallel axes passing through different points fixed with respect to the rigid body. For example, one may wish to relate the inertia tensor through the center of mass to another location that is constrained to remain stationary, like the tip of the spinning top.
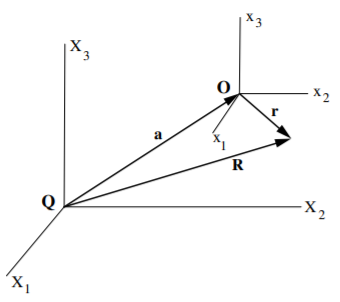
Consider the mass α at the location r=(x1,x2,x3) with respect to the origin of the center of mass body-fixed coordinate system O. Transform to an arbitrary but parallel body-fixed coordinate system Q, that is, the coordinate axes have the same orientation as the center of mass coordinate system. The location of the mass α with respect to this arbitrary coordinate system is R=(X1,X2,X3). That is, the general vectors for the two coordinates systems are related by
R=a+r
where a is the vector connecting the origins of the coordinate systems O and Q illustrated in Figure 13.8.1. The elements of the inertia tensor with respect to axis system Q, are given by equation (13.4.1) to be
Jij≡N∑αmα[δij(3∑kX2α,k)−Xα,iXα,j]
The components along the three axes for each of the two coordinate systems are related by
Xi=ai+xi
Substituting these into the above inertia tensor relation gives
Jij=N∑αmα[δij(3∑k(xα,k+ai)2)−(xα,i+ai)(xα,j+ai)]=N∑αmα[δij(3∑kx2α,k)−xα,ixα,j]+N∑αmα[δij(3∑k(2xα,kak+a2k))−(aixα,j+ajxα,i+aiaj)]
The first summation on the right-hand side corresponds to the elements Iij of the inertia tensor in the center-of-mass frame. Thus the terms can be regrouped to give
Jij≡Iij+N∑αmα(δij3∑ka2k−aiaj)+N∑αmα[2δij3∑kxα,kak−aixα,j−ajxα,i]
However, each term in the last bracket involves a sum of the form ∑Nαmαxα,k. Take the coordinate system O to be with respect to the center of mass for which
N∑αmαr′=0
This also applies to each component k, that is
N∑αmαxα,k=0
Therefore all of the terms in the last bracket cancel leaving
Jij≡Iij+N∑αmα(δij3∑ka2k−aiaj)
But ∑Nαmα=M and ∑3ka2k=a2, thus
Jij≡Iij+M(a2δij−aiaj)
where Iij is the center-of-mass inertia tensor. This is the general form of Steiner’s parallel-axis theorem.
As an example, the moment of inertia around the X1 axis is given by
J11≡I11+M((a21+a22+a33)δ11−a21)=I11+M(a22+a23)
which corresponds to the elementary statement that the difference in the moments of inertia equals the mass of the body multiplied by the square of the distance between the parallel axes, x1,X1. Note that the minimum moment of inertia of a body is Iij which is about the center of mass.
Example 13.8.1: Inertia Tensor of a Solid Cube Rotating about the Center of Mass
The complicated expressions for the inertia tensor can be understood using the example of a uniform solid cube with side b, density ρ, and mass M=ρb3, rotating about different axes. Assume that the origin of the coordinate system O is at the center of mass with the axes perpendicular to the centers of the faces of the cube.
The components of the inertia tensor can be calculated using (13.4.2) written as an integral over the mass distribution rather than a summation.
Iij=∫ρ(r′)(δij(3∑kx2k)−xixj)dV
Thus
I11=ρ∫b/2−b/2∫b/2−b/2∫b/2−b/2(x22+x23)dx3dx2dx1=16ρb5=16Mb2=I22=I33
By symmetry the diagonal moments of inertia about each face are identical. Similarly the products of inertia are given by
I12=−ρ∫b/2−b/2∫b/2−b/2∫b/2−b/2(x1x2)dx3dx2dx1=0
Thus the inertia tensor is given by
Icm=16Mb2(100010001)
Note that this inertia tensor is diagonal implying that this is the principal axis system. In this case all three principal moments of inertia are identical and perpendicular to the centers of the faces of the cube. This is as expected from the symmetry of the cubic geometry.
Example 13.8.2: Inertia tensor of about a corner of a solid cube.
Direct calculation
Let one corner of the cube be the origin of the coordinate system Q and assume that the three adjacent sides of the cube lie along the coordinate axes. The components of the inertia tensor can be calculated using (13.4.2). Thus
I11=ρ∫b0∫b0∫b0(x22+x23)dx3dx2dx1=23ρb5=23Mb2
I12=ρ∫b0∫b0∫b0(x1x2)dx3dx2dx1=−14ρb5=−14Mb2
Thus, evaluating all the nine components gives
Icorner=112Mb2(8−3−3−38−3−3−38)
Parallel-axis theorem
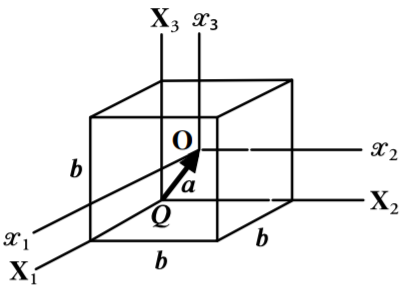
This inertia tensor also can be calculated using the parallel-axis theorem to relate the moment of inertia about the corner, to that at the center of mass. As shown in Figure 13.8.2, the vector a has components
a1=a2=a3=b2
Applying the parallel-axis theorem gives
J11=I11+M(a2−a21)=I11+M(a22+a23)=16Mb2+12Mb2=23Mb2
and similarly for J22 and J33. The off-diagonal terms are given by
J12=I12+M(−a1a2)=−14Mb2
Thus the inertia tensor, transposed from the center of mass, to the corner of the cube is
Icorner=(23Mb2−14Mb2−14Mb2−14Mb223Mb2−14Mb2−14Mb2−14Mb223Mb2)=112Mb2(8−3−3−38−3−3−38)
This inertia tensor about the corner of the cube, is the same as that obtained by direct integration.
Principal moments of inertia
The coordinate axis frame used for rotation about the corner of the cube is not a principal axis frame. Therefore let us diagonalize the inertia tensor to find the principal axis frame and the principal moments of inertia about a corner. To achieve this requires solving the secular determinant
|(23Mb2−I)−14Mb2−14Mb2−14Mb2(23Mb2−I)−14Mb2−14Mb2−14Mb2(23Mb2−I)|=0
The value of a determinant is not affected by adding or subtracting any row or column from any other row or column. Subtract row 1 from row 2 gives
|(23Mb2−I)−14Mb2−14Mb2−1112Mb2(1112Mb2−I)0−14Mb2−14Mb2(23Mb2−I)|=0
The determinant of this matrix is straightforward to evaluate and equals
(16Mb2−I)(1112Mb2−I)(1112Mb2−I)=0
Thus the roots are
Icorner=(16Mb20001112Mb20001112Mb2)
The identical roots I22=I33=1112Mb2 imply that the principal axis associated with I11 must be a symmetry axis. The orientation can be found by substituting I11 into the above equation
({I}−I{I})⋅ω=112Mb2(6−3−3−36−3−3−36)(ω11ω21ω31)=0
where the second subscript 1 attached to ωi signifies that this solution corresponds to I11. This gives
2ω11−ω21−ω31=0−ω11+2ω21−ω31=0−ω11−ω21+2ω31=0
Solving these three equations gives the unit vector for the first principal axis for which I11=16Mb2 to be ˆe1=1√3(111). This can be repeated to find the other two principal axes by substituting I22=1112Mb2. This gives for the second principal moment I22
({I}−I{I})⋅ω=112Mb2(−3−3−3−3−3−3−3−3−3)(ω12ω22ω32)=0
This results in three identical equations for the components of ω but all three equations are the same, namely
ω12+ω22+ω32=0
This does not uniquely determine the direction of ω. However, it does imply that ω2 corresponding to the second principal axis has the property that
ˆω⋅ˆe1=0
that is, any direction of ˆe2 that is perpendicular to ˆe1 is acceptable. In other words; any two orthogonal unit vectors ˆe2 and ˆe3 that are perpendicular to ˆe1 are acceptable. This ambiguity exists whenever two eigenvalues are equal; the three principal axes are only uniquely defined if all three eigenvalues are different. The same ambiguity exist when all three eigenvalues are identical as occurs for the principal moments of inertia about the center-of-mass of a uniform solid cube. This explains why the principal moment of inertia for the diagonal of the cube, that passes through the center of mass, has the same moment as when the principal axes pass through the center of the faces of the cube.