
13.24: The Rolling Wheel
- Page ID
- 30811

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
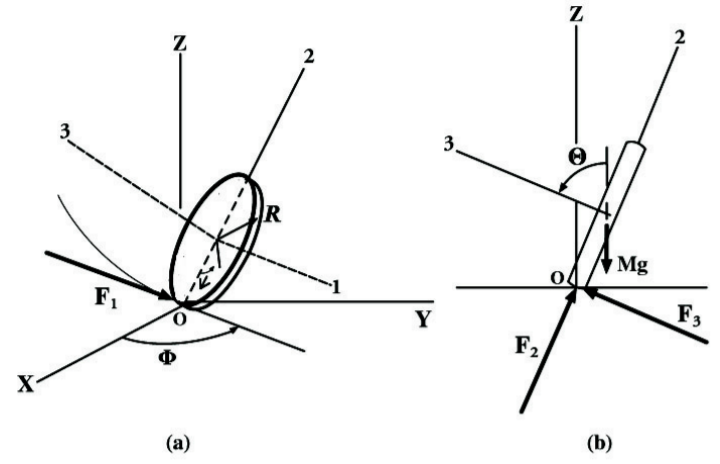
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)As discussed in chapter \(5.7\), the rolling wheel is a non-holonomic system that is simple in principle, but in practice the solution can be complicated, as illustrated by the Tippe Top. Chapter \(13.23\) discussed the motion of a symmetric top rotating about a fixed point on the symmetry axis when subject to a torque. The rolling wheel involves rotation of a symmetric rigid body that is subject to torques. However, the point of contact of the wheel with a static plane is on the periphery of the wheel, and friction at the point of contact is assumed to ensure zero slip. Note that friction is necessary to ensure that the rotating object rolls without slipping, but the frictional force does no work for pure rolling of an undeformable rigid wheel.
The coordinate system employed is shown in Figure \(\PageIndex{1}\). For simplicity it is better to use a moving coordinate frame \((\mathbf{1},\mathbf{2},\mathbf{3})\) that is fixed to the orientation of the wheel with the origin at the center of mass of the wheel, but this moving reference frame does not include the angular velocity \(\dot{\psi}\) of the disk about the \(\mathbf{3}\) axis. That is, the moving \((\mathbf{1},\mathbf{2},\mathbf{3})\) frame has angular velocities
\[\begin{align} \omega_1 = \dot{\theta} \label{13.191} \\ \omega_2 = \dot{\phi} \sin \theta \notag\\ \omega_3 = \dot{\phi} \cos \theta \notag\end{align}\]
The frame fixed in the rotating wheel must include the additional angular velocity of the disk \(\dot{\psi}\) about the \(\mathbf{\hat{e}}_3\) axis, that is
\[\begin{align}\Omega_1 = \omega_1 = \dot{\theta} \label{13.192} \\ \Omega_2 = \omega_2 = \dot{\phi} \sin \theta \notag\\ \Omega_3 = \omega_3 + \dot{\psi} = \dot{\phi} \cos \theta + \dot{\psi} \notag\end{align}\]
where \(\Omega \) designates the angular velocity of the rotating disk, while \(\boldsymbol{\omega}\) designates the rotation of the moving frame \((\mathbf{1},\mathbf{2},\mathbf{3})\).
The principle moments of inertia of a thin circular disk are related by the perpendicular axis theorem (chapter \(13.9\))
\[I_1 + I_2 = I_3 \notag \]
Since \(I_1 = I_2\) for a uniform disk, therefore \(I_3 = 2I_1\).
Equation \((12.3.10)\) can be used to relate the vector forces \(\mathbf{F}\) in the space-fixed frame to the rate of change of momenta in the moving frame \((\mathbf{1},\mathbf{2},\mathbf{3})\).
\[\mathbf{F} = \mathbf{\dot{p}}_{space} = \mathbf{\dot{p}}_{moving} + \boldsymbol{\omega} \times \mathbf{p} \label{13.193}\]
This leads to the following relations for the three components in the moving frame
\[\begin{align}F_1 = \dot{p}_1 + \omega_2 p_3 − \omega_3 p_2 \label{13.194} \\ F_2 − Mg \sin \theta = \dot{p}_2 + \omega_3 p_1 − \omega_1 p_3 \notag\\ F_3 − Mg \cos \theta = \dot{p}_3 + \omega_1 p_2 − \omega_2 p_1 \notag\end{align}\]
where \(F_1, F_2, F_3\) are the reactive forces acting shown in Figure \(\PageIndex{1}\).
Similarly, the torques \(\mathbf{N}\) in the space-fixed frame can be related to the rate of change of angular momentum by
\[\mathbf{N} = \mathbf{\dot{L}}_{space} = \mathbf{\dot{L}}_{moving} + \boldsymbol{\omega} \times \mathbf{L} \label{13.195}\]
where \(L_i = \mathbf{I}_i\Omega _i\). This leads to the following relations for the three torque equations in the moving frame
\[\begin{align}N_1 = −F_3 R = I_1 \dot{\Omega}_1 + I_3\Omega_3\omega_2 − I_2\Omega 2\omega_3 \label{13.196} \\ N_2 = 0 = I_1 \dot{\Omega}_2 + I_1 \Omega_1 \omega_3 − I_3\Omega_3\omega_1 \notag\\ N_3 = F_1 R = I_3 \dot{\Omega}_3 + I_2 \Omega_2 \omega_1 − I_1\Omega_1 \omega_2 \notag\end{align}\]
The rolling constraints are
\[p_1 + MR \Omega_3 = 0 \label{13.197} \\ p_2 = 0 \\ p_3 − MR \Omega_1 = 0 \]
where \(p_i = Mv_i\). Combining equations \ref{13.194}, \ref{13.196}, \ref{13.197} gives
\[\begin{align}(I_1 + MR^2) \dot{\Omega}_1 + ( I_3 + MR^2) \omega_2\Omega_3 − I_2\omega_3\Omega_2 = −MgR \cos \theta \label{13.198} \\ I_1\dot{\Omega}_2 + I_1\omega_3\Omega_1 − I_3\omega_1\Omega_3 = 0 \notag\\ ( I_3 + MR^2) \dot{\Omega}_3 + I_2\omega_1\Omega_2 − ( I_1 + MR^2) \omega_2\Omega_1 = 0 \notag\end{align}\]
These are the torque equations about the point of contact \(O\).
Introduction of equations \ref{13.191} and \ref{13.192} into Equation \ref{13.198} expresses the equations of motion in terms of the Euler angles to be
\[\begin{align}( I_1 + MR^2) \ddot{\theta} + ( I_3 + MR^2) \dot{\phi} \sin \theta \left( \dot{\phi} \cos \theta + \dot{\psi}\right)− I_1\dot{\phi}^2 \sin \theta \cos \theta = −MgR \cos \theta \label{13.199} \\ \notag I_1 \ddot{\phi} \sin \theta + 2I_1\dot{\phi} \dot{\theta} \cos \theta − I_3 \dot{\theta} \left( \dot{\phi} \cos \theta + \dot{\psi}\right)= 0 \\ \notag ( I_3 + MR^2) \left( \ddot{\phi} \cos \theta − \dot{\phi} \dot{\theta} \sin \theta + \ddot{\psi} \right)− MR^2 \dot{\theta}\dot{\phi} \sin \theta = 0 \end{align}\]
Equations \ref{13.199} are non-linear, and a closed-form solution is possible only for limited cases such as when \(\theta = 90^{\circ}\).
Note that the above equations of motion also can be derived using Lagrangian mechanics knowing that
\[L = \frac{1}{2} M ( v^2_1 + v^2_2 + v^2_3 ) + \frac{1}{2} I_1 ( \Omega^2_1 + \Omega^2_2 ) + \frac{1}{2} I_3\Omega^2_3 − MgR \cos \theta \notag\]
The differential equations of constraint can be derived from equations \ref{13.197} to be
\[dx − R \cos \phi d\psi = 0 \notag\]
\[dy − R \sin \phi d\psi = 0 \]
Use of generalized forces plus the Lagrange-Euler equations \((6.3.28)\) can be used to derive the equations of motion and solve for the components of the constraint force \(F_1\), \(F_2\), and \(F_3\).
Example \(\PageIndex{1}\): Tipping stability of a rolling wheel
A circular wheel rolling in a vertical plane at high angular velocity initially rolls in a straight line and remains vertical. However, below a certain angular velocity, gyroscopic forces become weaker and the wheel will tip sideways and veer rapidly from the initial direction. It is interesting to estimate the minimum angular velocity of the disk such that it does not start to tip over sideways.
Note that equations \ref{13.199} are satisfied for \(\theta = \frac{\pi}{2}\), \(\phi = 0\) and \(\dot{\psi} = \Omega_3 = \) constant. Assume a small disturbance causes the tilt angle to be \(\theta = \frac{\pi}{2} + \alpha\) where \(\alpha\) is small and that \(\phi\) is non-zero but small, that is \(\dot{\theta} = \dot{\alpha}\) and \(\dot{\phi}\) are small. Keeping only terms to first order in the third of equations \ref{13.199}, and integrating gives
\[\dot{\phi} \cos \theta + \dot{\psi} = \Omega_3 \tag{a}\label{a}\]
The first two of equations \ref{13.198} become
\[( I_1 + MR^2) \ddot{\alpha} + ( I_3 + MR^2) \dot{\phi} \Omega_3 − MgR\alpha = 0 \tag{b}\label{b}\]
\[I_1 \ddot{\phi} − I_3\Omega_3 \dot{\alpha} = 0 \tag{c}\label{c}\]
Integrating Equation \ref{c} gives
\[\dot{\phi} = \frac{I_3\Omega_3}{ I_1 } \alpha \tag{d}\label{d}\]
Inserting \ref{d} into \ref{b} gives
\[( I_1 + MR^2) \ddot{\alpha} + \left[ ( I_3 + MR^2) \frac{I_3\Omega^2_3}{ I_1 } − MgR \right] \alpha = 0 \tag{e}\label{e}\]
Equation \ref{e} has a stable oscillatory solution when the square bracket in positive, that is,
\[\Omega^2_3 > \frac{I_1MgR}{ I_3 (I_3 + MR^2)} \tag{f}\label{f}\]
which gives the minimum angular velocity required for stable rolling motion. For angular velocity less than the minimum, the square bracket in Equation \ref{e} is negative leading to an exponentially decaying and divergent solution. For a uniform disk the perpendicular axis theorem gives \(I_3 = 2I_1 = \frac{1}{2} MR^2\) for which Equation \ref{f} gives
\[\Omega^2_3 \frac{g}{3R} \tag{g}\label{g}\]
Therefore the critical linear velocity of the wheel is
\[v = R\Omega_3 > \sqrt{\frac{gR}{3}} \tag{h}\label{h}\]
The bicycle wheel provides a common example of the tipping of a rolling wheel. For the typical \(0.35\) \(m\) radius of a bicycle wheel, this gives a critical velocity of \(v > 1.07\) \(m/s\) \(= 2.4\) \(mph\).4
4The stability of the bicycle is sensitive to the castor and other aspects of the steering geometry of the front wheel, in addition to the gyroscopic effects. Excellent articles on this sub ject have been written by D.E.H. Jones Physics Today 23(4) (1970) 34, and also by J. Lowell & H.D. McKell, American Journal of Physics 50 (1982) 1106.