
17.2: Galilean Invariance
- Page ID
- 9664

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)As discussed in chapter \(2.3\), an inertial frame is one in which Newton’s Laws of motion apply. Inertial frames are non-accelerating frames so that pseudo forces are not induced. All reference frames moving at constant velocity relative to an inertial reference, are inertial frames. Newton’s Laws of nature are the same in all inertial frames of reference and therefore there is no way of determining absolute motion because no inertial frame is preferred over any other. This is called Galilean-Newtonian invariance. Galilean invariance assumes that the concepts of space and time are completely separable. Time is assumed to be an absolute quantity that is invariant to transformations between coordinate systems in relative motion. Also the element of length is the same in different Galilean frames of reference.
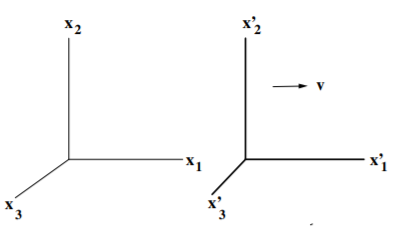
Consider two coordinate systems shown in Figure \(\PageIndex{1}\), where the primed frame is moving along the \(x\) axis of the fixed unprimed frame. A Galilean transformation implies that the following relations apply;
\[x^{\prime}_1 = x_1 − vt \\ x^{\prime}_2 = x_2 \\ x^{\prime}_3 = x_3 \\ t^{\prime} = t\]
Note that at any instant \(t\), the infinitessimal units of length in the two systems are identical since
\[ds^2 = \sum^2_{i=1} dx^2_i = \sum^3_{i=1} dx^{\prime 2}_i = ds^{\prime 2}\]
These are the mathematical expression of the Newtonian idea of space and time. An immediate consequence of the Galilean transformation is that the velocity of light must differ in different inertial reference frames.
At the end of the 19\(^{th}\) century physicists thought they had discovered a way of identifying an absolute inertial frame of reference, that is, it must be the frame of the medium that transmits light in vacuum. Maxwell’s laws of electromagnetism predict that electromagnetic radiation in vacuum travels at \(c = \frac{1}{\sqrt{\mu_o \varepsilon_o}} = 2.998 \times 10^8\) \(m/s\). Maxwell did not address in what frame of reference that this speed applied. In the nineteenth century all wave phenomena were transmitted by some medium, such as waves on a string, water waves, sound waves in air. Physicists thus envisioned that light was transmitted by some unobserved medium which they called the ether. This ether had mystical properties, it existed everywhere, even in outer space, and yet had no other observed consequences. The ether obviously should be the absolute frame of reference.
In the 1880's, Michelson and Morley performed an experiment in Cleveland to try to detect this ether. They transmitted light back and forth along two perpendicular paths in an interferometer, shown in Figure \(\PageIndex{2}\), and assumed that the earth’s motion about the sun led to movement through the ether.
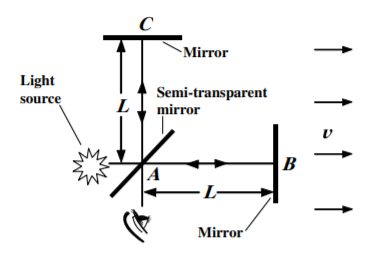
The time taken to travel a return trip takes longer in a moving medium, if the medium moves in the direction of the motion, compared to travel in a stationary medium. For example, you lose more time moving against a headwind than you gain travelling back with the wind. The time difference \(\Delta t\), for a round trip to a distance \(L\), between travelling in the direction of motion in the ether, versus travelling the same distance perpendicular to the movement in the ether, is given by \(\Delta t \approx \frac{L}{c} \left(\frac{v}{c}\right)^2\) where \(v\) is the relative velocity of the ether and \(c\) is the velocity of light.
Interference fringes between perpendicular light beams in an optical interferometer provides an extremely sensitive measure of this time difference. Michelson and Morley observed no measurable time difference at any time during the year, that is, the relative motion of the earth within the ether is less than \(1/6\) the velocity of the earth around the sun. Their conclusion was either, that the ether was dragged along with the earth, or the velocity of light was dependent on the velocity of the source, but these did not jibe with other observations. Their disappointment at the failure of this experiment to detect evidence for an absolute inertial frame is important and confounded physicists for two decades until Einstein’s Special Theory of Relativity explained the result.