
19.9: Appendix - Vector Integral Calculus




- Last updated
- Jul 2, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Field equations, such as for electromagnetic and gravitational fields, require both line integrals, and surface integrals, of vector fields to evaluate potential, flux and circulation. These require use of the gradient, the Divergence Theorem and Stokes Theorem which are discussed in the following sections.
Line integral of the gradient of a scalar field
The change ΔV in a scalar field for an infinitessimal step dl along a path can be written as
ΔV=(∇V)⋅dl
since the gradient of V, that is, ∇V, is the rate of change of V with dl. Discussions of gravitational and electrostatic potential show that the line integral between points a and b is given in terms of the del operator by
Vb−Va=∫ba(∇V)⋅dl
This relates the difference in values of a scalar field at two points to the line integral of the dot product of the gradient with the element of the line integral.
Divergence Theorem
Flux of a vector field for Gaussian surface
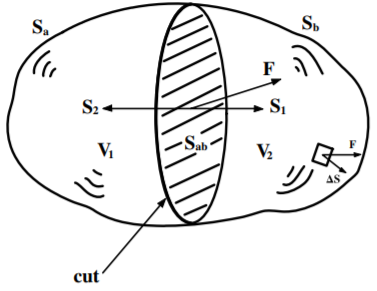
Consider the flux Φ of a vector field F for a closed surface, usually called a Gaussian surface, S shown in Figure 19.9.1.
Φ=∮SF⋅dS
If the enclosed volume is cut in to two pieces enclosed by surfaces S1=Sa+Sab and S2=Sb+Sab. The flux through the surface Sab common to both S1 and S2 are equal and in the same direction. Then the net flux through the sum of S1 and S2 is given by
∮S1F⋅dS+∮S2F⋅dS=∮SF⋅dS
since the contributions of the common surface Sab cancel in that the flux out of S1 is equal and opposite to the flux into S2 over the surface Sab. That is, independent of how many times the volume enclosed by S is subdivided, the net flux for the sum of all the Gaussian surfaces enclosing these subdivisions of the volume, still equals ∮SF⋅dS.
Consider that the volume enclosed by S is subdivided into N subdivisions where N→∞, then even though ∮SiF⋅dS→0 as N→∞, the sum over surfaces of all the infinitessimal volumes remains unchanged
Φ=∮SF⋅dS=N→∞∑i∮SiF⋅dS
Thus we can take the limit of a sum of an infinite number of infinitessimal volumes as is needed to obtain a differential form. The surface integral for each infinitessimal volume will equal zero which is not useful, that is ∮SiF⋅dS→0 as N→∞. However, the flux per unit volume has a finite value as N→∞. This ratio is called the divergence of the vector field;
divF=LimΔτi→0∮SiF⋅dSΔτi
where Δτi is the infinitessimal volume enclosed by surface Si. The divergence of the vector field is a scalar quantity.
Thus the sum of flux over all infinitessimal subdivisions of the volume enclosed by a closed surface S equals
Φ=∮SF⋅dS=N→∞∑i∮SiF⋅dSΔτiΔτi=N→∞∑idivFΔτi
In the limit N→∞, Δτi→0, this becomes the integral;
Φ=∮SF⋅dS=∫Enclosed volumedivFdτ
This is called the Divergence Theorem or Gauss’s Theorem. To avoid confusion with Gauss’s law in electrostatics, it will be referred to as the Divergence theorem.
Divergence in Cartesian Coordinates
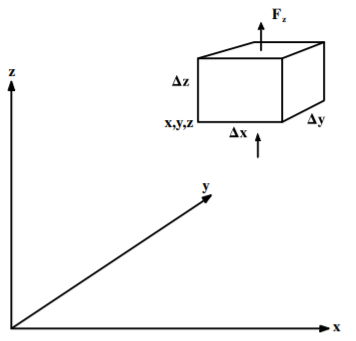
Consider the special case of an infinitessimal rectangular box, size Δx,Δy,Δz shown in Figure 19.9.2. Consider the net flux for the z component Fz entering the surface ΔxΔy at location (x,y,z).
ΔΦinz=(Fz+Δx2∂Fz∂x+Δy2∂Fz∂y)ΔxΔy
The net flux of the z component out of the surface at z+Δz is
ΔΦoutz=(Fz+Δz∂Fz∂z+Δx2∂Fz∂x+Δy2∂Fz∂y)ΔxΔy
Thus the net flux out of the box due to the z component of F is
ΔΦz=ΔΦoutz−ΔΦinz=∂Fz∂zΔxΔyΔz
Adding the similar x and y components for ΔΦ gives
ΔΦ=(∂Fx∂x+∂Fy∂y+∂Fz∂z)ΔxΔyΔz
This gives that the divergence of the vector field F is
divF=LimΔτi→0∮SiF⋅dSΔτi=(∂Fx∂x+∂Fy∂y+∂Fz∂z)
since Δτ=ΔxΔyΔz. But the right hand side of the equation equals the scalar product ∇⋅F, that is,
divF=∇⋅F
The divergence is a scalar quantity. The physical meaning of the divergence is that it gives the net flux per unit volume flowing out of an infinitessimal volume. A positive divergence corresponds to a net outflow of flux from the infinitessimal volume at any location while a negative divergence implies a net inflow of flux to this infinitessimal volume.
It was shown that for an infinitessimal rectangular box
ΔΦ=(∂Fx∂x+∂Fy∂y+∂Fz∂z)ΔxΔyΔz=∇⋅FΔτ
Integrating over the finite volume enclosed by the surface S gives
Φ=∮SF⋅dS=∫Enclosedvolume∇⋅Fdτ
This is another way of expressing the Divergence theorem
Φ=∮SF⋅dS=∫EnclosedvolumedivFdτ
The divergence theorem, developed by Gauss, is of considerable importance, it relates the surface integral of a vector field, that is, the outgoing flux, to a volume integral of ∇⋅F over the enclosed volume.
Example 19.9.1: Maxwell's Flux Equations
As an example of the usefulness of this relation, consider the Gauss’s law for the flux in Maxwell’s equations.
Gauss’ Law for the electric field
ΦE=∮Closed surfaceE⋅dS=1ε0∫enclosed volumeρdτ
But the divergence relation gives that
ΦE=∮SE⋅dS=∫Enclosed volume∇⋅Edτ
Combining these gives
∮Closed surfaceE⋅dS=∫Enclosed volume∇⋅Edτ=1ε0∫enclosed volumeρdτ
This is true independent of the shape of the surface or enclosed volume, leading to the differential form of Maxwell’s first law, that is Gauss’s law for the electric field.
∇⋅E=ρε0
The differential form of Gauss’s law relates ∇⋅E to the charge density ρ at that same location. This is much easier to evaluate than a surface and volume integral required using the integral form of Gauss’s law.
Gauss’s law for magnetism
ΦB=∮Closed surfaceB⋅dS=0
Using the divergence theorem gives that
ΦB=∮Closed surfaceB⋅dS=∫Enclosed volume∇⋅Bdτ=0
This is true independent of the shape of the Gaussian surface leading to the differential form of Gauss’s law for B
∇⋅B=0
That is, the local value of the divergence of B is zero everywhere.
Example 19.9.2: Buoyancy forces in fluids
Buoyancy in fluids provides an example of the use of flux in physics. Consider a fluid of density ρ(z) in a gravitational field ˉg(z)=−g(z)ˆz where the z axis points in the opposite direction to the gravitational force. Pressure equals force per unit area and is a scalar quantity. For a conservative fluid system, in static equilibrium, the net work done per unit area for an infinitessimal displacement dr is zero. The net pressure force per unit area is the difference P(r+dr)−P(r)=∇P⋅dr while the net change in gravitational potential energy is ρ(z)ˉg(z)⋅dr. Thus energy conservation gives
[∇P+ρ(z)ˉg(z)]⋅dr=0
which can be expanded as
dPdz=−ρ(z)g(z)dPdx=dPdy=0
Integrating the net forces normal to the surface over any closed surface enclosing an empty volume, inside the fluid, gives a net buoyancy force on this volume that simplifies using the Divergence theorem
∮F⋅dS=∮PdˆS⋅dS=∮PdS=∫Enclosed vol(dPdx+dPdy+dPdz)dτ
Using equations A leads to the net buoyancy force
∮F⋅dS=∫Enclosed voldPdzdτ=−∫Enclosed volρ(z)g(z)dτ
The right hand side of this equation equals minus the weight of the displaced fluid. That is, the buoyancy force equals the weight of the fluid displaced by the empty volume. Note that this proof applies both to compressible fluids, where the density depends on pressure, as well as to incompressible fluids where the density is constant. It also applies to situations where local gravity g is position dependent. If an object of mass M is completely submerged then the net force on the object is Mg−∫Enclosed volρ(z)g(z)dτ. If the object floats on the surface of a fluid then the buoyancy force must be calculated separately for the volume under the fluid surface and the upper volume above the fluid surface. The buoyancy due to displaced air usually is negligible since the density of air is about 10−3 times that of fluids such as water.
Stokes Theorem
The curl
Maxwell’s laws relate the circulation of the field around a closed loop to the rate of change of flux through the surface bounded by the closed loop. It is possible to write these integral equations in a differential form as follows.
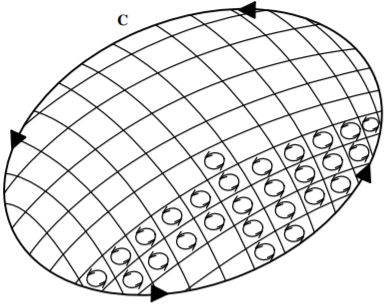
Consider the line integral around a closed loop C shown in Figure 19.9.3.
If this area is subdivided into two areas enclosed by loops C1 and C2, then the sum of the line integrals is the same
∮CF⋅dl=∮C1F⋅dl+∮C2F⋅dl
because the contributions along the common boundary cancel since they are taken in opposite directions if C1 and C2 both are taken in the same direction. Note that the line integral, and corresponding enclosed area,
are vector quantities related by the right-hand rule and this must be taken into account when subdividing the area. Thus the area can be subdivided into an infinite number of pieces for which
∮CF⋅dl=N→∞∑i∮CiF⋅dl=N→∞∑i∮CiF⋅dlΔSi⋅ˆnΔSi⋅ˆn
where ΔSi is the infinitessimal area bounded by the closed sub-loop Ci and ΔSi⋅ˆn is the normal component of this area pointing along the ˆn direction which is the direction along which the line integral points.
The component of the curl of the vector function along the direction ˆn is defined to be
(curlF)⋅ˆn≡LimΔS→0N→∞∑i∮CiF⋅dlΔSi⋅ˆn
Thus the line integral can be written as
∮CF⋅dl=N→∞∑i∮CiF⋅dlΔSi⋅ˆnΔSi⋅ˆn=∫[(curlF)⋅ˆn]dSi⋅ˆn
The product ˆn⋅ˆn=1, that is, this is true independent of the direction of the infinitessimal loop. Thus the above relation leads to Stokes Theorem
∮CF⋅dl=∫Area bounded by C(curlF)⋅dS
This relates the line integral to a surface integral over a surface bounded by the loop.
Curl in cartesian coordinates
Consider the infinitessimal rectangle ΔxΔy pointing in the ˆk direction shown in Figure 19.9.4.
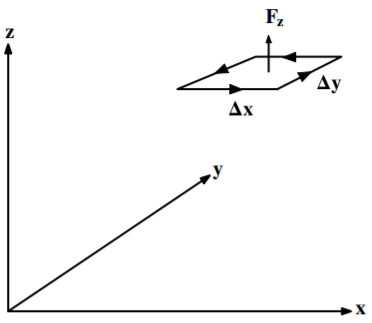
The line integral, taken in a right-handed way around ˆk gives
∮CF⋅dl=FxΔx+(Fy+∂Fy∂xΔx)−(Fx+∂Fx∂yΔy)−FyΔy=(∂Fy∂x−∂Fx∂y)ΔxΔy
Thus since ΔxΔy=ΔSz the z component of the curl is given by
(curlF)⋅ˆk=∮CiF⋅dlΔSi⋅ˆn=(∂Fy∂x−∂Fx∂y)
The same argument for the component of the curl in the y direction is given by
(curlF)⋅ˆj=(∂Fx∂z−∂Fz∂x)
Similarly the same argument for the component of the curl in the x direction is given by
(curlF)⋅ˆi=(∂Fz∂y−∂Fy∂z)
Thus combining the three components of the curl gives
curlF=(∂Fz∂y−∂Fy∂z)ˆi+(∂Fx∂z−∂Fz∂x)ˆj+(∂Fy∂x−∂Fx∂y)ˆk
Note that cross-product of the del operator with the vector F is
∇×F=|ˆiˆjˆk∂∂x∂∂y∂∂zFxFyFz|
which is identical to the right hand side of the relation for the curl in cartesian coordinates. That is;
∇×F=curl→F
Therefore Stokes Theorem can be rewritten as
∮CF⋅dl=∫Area bounded by C(curlF)⋅dS=∫Area bounded by C(∇×F)⋅dS
The physics meaning of the curl is that it is the circulation, or rotation, for an infinitessimal loop at any location. The word curl is German for rotation.
Example 19.9.3: Maxwell's circulation equations
As an example of the use of the curl, consider Faraday’s Law
∫Closed loop CE⋅dl=−∫surface bounded by C∂B∂t⋅∂S
Using Stokes Theorem gives
∮CE⋅dl=∫Surface bounded by C(∇×E)⋅dS
These two relations are independent of the shape of the closed loop, thus we obtain Faraday’s Law in the differential form
(∇×E)=−∂B∂t
A differential form of the Ampère-Maxwell law also can be obtained from
∫Closed loop CB⋅dl=μ0∫Bounded by C(j+ε0∂E∂t)⋅dS
Using Stokes Theorem
∮CB⋅dl=∫Surface bounded by C(∇×B)⋅dS
Again this is independent of the shape of the loop and thus we obtain Ampère-Maxwell law in differential form
∇×B=μ0j+μ0ε0∂E∂t
The differential forms of Maxwell’s circulation relations are easier to apply than the integral equations because the differential form relates the curl to the time derivatives at the same specific location.
Potential formulations of curl-free and divergence-free fields
Interesting consequences result from the Divergence theorem and Stokes Theorem for vector fields that are either curl-free or divergence-free. In particular two theorems result from the second derivatives of a vector field.
Theorem 1 - Curl-free (irrotational) fields:
For curl-free fields
∇×F=0
everywhere. This is automatically obeyed if the vector field is expressed as the gradient of a scalar field
F=∇ϕ
since
∇×(∇ϕ)=0
That is, any curl-free vector field can be expressed in terms of the gradient of a scalar field.
The scalar field ϕ is not unique, that is, any constant α can be added to ϕ since ∇α=0, that is, the addition of the constant α does not change the gradient. This independence to addition of a number to the scalar potential is called a gauge invariance discussed in chapter 13.2, for which
F=∇ϕ′=∇(ϕ+α)=∇ϕ
That is, this gauge-invariant transformation does not change the observable F. The electrostatic field E and the gravitation field g are examples of irrotational fields that can be expressed as the gradient of scalar potentials.
Theorem 2 - Divergence-free (solenoidal) fields:
For divergence-free fields
∇⋅F=0
everywhere. This is automatically obeyed if the field F is expressed in terms of the curl of a vector field G such that
F=∇×G
since ∇⋅∇×G=0. That is, any divergence-free vector field can be written as the curl of a related vector field.
As discussed in chapter 13.2, the vector potential G is not unique in that a gauge transformation can be made by adding the gradient of any scalar field, that is, the gauge transformation G′=G+∇φ gives
F=∇×G′=∇×(G+∇φ)=∇×G.
This gauge invariance for transformation to the vector potential G′ does not change the observable vector field F. The magnetic field B is an example of a solenoidal field that can be expressed in terms of the curl of a vector potential A.
Example 19.9.4: Electromagnetic fields
Electromagnetic interactions are encountered frequently in classical mechanics so it is useful to discuss the use of potential formulations of electrodynamics.
For electrostatics, Maxwell’s equations give that
∇×E=0
Therefore theorem 1 states that it is possible to express this static electric field as the gradient of the scalar electric potential V, where
E=−∇V
For electrodynamics, Maxwell’s equations give that
(∇×E)+∂B∂t=0
Assume that the magnetic field can be expressed in the terms of the vector potential B=∇×A, then the above equation becomes
∇×(E+∂A∂t)=0
Theorem 1 gives that this curl-less field can be expressed as the gradient of a scalar field, here taken to be the electric potential V.
(E+∂A∂t)==−∇V
that is
E=−(∇V+∂A∂t)
Gauss’ law states that
∇⋅E=ρε0
which can be rewritten as
∇⋅E=−∇2V−∂(∇⋅A)∂t=ρε0
Similarly insertion of the vector potential A in Ampère’s Law gives
∇×B=∇×(∇×A)=μ0j+μ0ε0∂E∂t=μ0j−μ0ε0∇(∂V∂t)−μ0ε0(∂2A∂t2)
Using the vector identity ∇×(∇×A)=∇(∇⋅A)−∇2A allows the above equation to be rewritten as
(∇2A−μ0ε0(∂2A∂t2))−∇(∇⋅A+μ0ε0(∂V∂t))=−μ0j
The use of the scalar potential V and vector potential A leads to two coupled equations X and Y. These coupled equations can be transformed into two uncoupled equations by exploiting the freedom to make a gauge transformation for the vector potential such that the middle brackets in both equations X and Y are zero. That is, choosing the Lorentz gauge
∇⋅A=−μ0ε0(∂V∂t)
simplifies equations X and Y to be
∇2V−μ0ε0∂2V∂t2=−ρε0
∇2A−μ0ε0(∂2A∂t2)=−μ0j
The virtue of using the Lorentz gauge, rather than the Coulomb gauge ∇⋅A=0, is that it separates the equations for the scalar and vector potentials. Moreover, these two equations are the wave equations for these two potential fields corresponding to a velocity c=1√μ0ε0. This example illustrates the power of using the concept of potentials in describing vector fields.