
4.3: Note on Curvilinear Coordinates

( \newcommand{\kernel}{\mathrm{null}\,}\)
Div, Grad and Curl in Orthogonal Curvilinear Coordinates
Problems with a particular symmetry, such as cylindrical or spherical, are best attacked using coordinate systems that take full advantage of that symmetry. For example, the Schrödinger equation for the hydrogen atom is best solved using spherical polar coordinates. For this and other differential equation problems, then, we need to find the expressions for differential operators in terms of the appropriate coordinates.
We only look at orthogonal coordinate systems, so that locally the three axes (such as r,θ,φ ) are a mutually perpendicular set. We denote the curvilinear coordinates by (u1,u2,u3). The standard Cartesian coordinates for the same space are as usual (x,y,z).
Suppose now we take an infinitesimally small cube with edges parallel to the local curvilinear coordinate directions, and therefore with faces satisfying ui=constant,i=1,2,3 for the three pairs of faces.
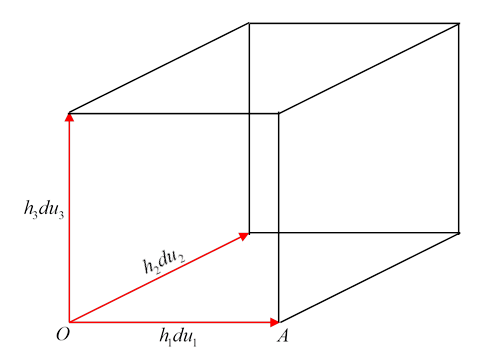
The lengths of the edges are then h1du1,h2du2 and h3du3, where h1,h2,h3 are in general functions of u1,u2,u3. That is to say, the distance across the cube from one corner to the opposite corner
ds2=h21du21+h22du22+h23du23=dx2+dy2+dz2
It is clear that the gradient of a function ψ in the u1 direction is
(∇ψ)1=limdu1→0ψ(A)−ψ(0)h1du1=1h1∂ψ∂u1
The divergence of a vector field →V in curvilinear coordinates is found using Gauss’ theorem, that the total vector flux through the six sides of the cube equals the divergence multiplied by the volume of the cube, in the limit of a small cube.
The area of the face bracketed by h2du2 and h3du3 is h2du2h3du3. For that face, the component of the vector field contributing to the flow from the cube is −V1, so the flow across the face is −V1h2h3du2du3. To find the flow across the opposite (parallel) face of the cube, corresponding to an increase in u1 of du1, we must bear in mind that h2,h3 and V1 all vary with u1, so the flow will be:
V1h2h3du2du3+∂∂u1(h2h3V1)du1du2du3
The first term here of course cancels the contribution from the other face. The remaining term, plus the terms with 123 replaced with 231 and 312 from the two other pairs of opposite faces, must, applying Gauss’ theorem, add to give
\vec{\nabla}\cdot\vec{V}\times volume =\vec{\nabla}\cdot\vec{V} h_1h_2h_3du_1du_2du_3. \tag{4.3.4}
This gives:
\vec{\nabla}\cdot\vec{V}=\dfrac{1}{h_1h_2h_3}\{\dfrac{\partial}{\partial u_1}(h_2h_3V_1)+\dfrac{\partial}{\partial u_2}(h_3h_1V_2)+\dfrac{\partial}{\partial u_3}(h_1h_2V_3)\} \tag{4.3.5}.
Putting this together with the expression for the gradient gives immediately the expression for the Laplacian operator in curvilinear coordinates:
\nabla^2\psi=\dfrac{1}{h_1h_2h_3}\{\dfrac{\partial}{\partial u_1}(\dfrac{h_2h_3}{h_1}\dfrac{\partial\psi}{\partial u_1})+\dfrac{\partial}{\partial u_2}(\dfrac{h_3h_1}{h_2}\dfrac{\partial\psi}{\partial u_2})+\dfrac{\partial}{\partial u_3}(\dfrac{h_1h_2}{h_3}\dfrac{\partial\psi}{\partial u_3}) \} \tag{4.3.6}
The curl of a vector field \vec{A} is found by integrating around one of the square faces. Thus, the 1-component of \vec{\nabla}\times\vec{A} is given by integrating \vec{A}\cdot\vec{ds} around the (23) square with two of its sides h_2du_2 and h_3du_3. The integral must equal (\vec{\nabla}\times\vec{A})_1 multiplied by the area h_2du_2h_3du_3. This gives
(\vec{\nabla}\times\vec{A})_1=\dfrac{1}{h_2h_3}\{\dfrac{\partial}{\partial u_2}(A_3h_3)−\dfrac{\partial}{\partial u_3}(A_2h_2)\}. \tag{4.3.7}
Cylindrical Coordinates
\begin{matrix}x=r\cos\varphi \\ y=r\sin\varphi \\ z=z \\ ds^2=dr^2+r^2d\varphi^2+dz^2 \end{matrix} \tag{4.3.8}
Here (u_1,u_2,u_3)=(r,\varphi,z), and (h_1,h_2,h_3)=(1,r,1).
Therefore, for example, \nabla^2\psi=\dfrac{1}{r} \dfrac{\partial}{\partial r}(r\dfrac{\partial\psi}{\partial r})+\dfrac{1}{r^2}\dfrac{\partial^2\psi}{\partial\varphi^2}+\dfrac{\partial^2\psi}{\partial z^2}. \tag{4.3.9}
Spherical Polar Coordinates
\begin{matrix} x=r\sin\theta\cos\varphi \\ y=r\sin\theta\sin\varphi \\ z=r\cos\theta \\ ds^2=dr^2+r^2d\theta^2+r^2\sin^2\theta d\varphi^2 \end{matrix}\tag{4.3.10}
So (u_1,u_2,u_3)=(r,\theta,\varphi) and (h_1,h_2,h_3)=(1,r,r\sin\theta).
Here \nabla^2\psi=\dfrac{1}{r^2}\dfrac{\partial}{\partial r}(r^2\dfrac{\partial\psi}{\partial r})+\dfrac{1}{r^2sin\theta}\dfrac{\partial}{\partial \theta}(\sin\theta\dfrac{\partial\psi}{\partial \theta})+\dfrac{1}{r^2\sin^2\theta}\dfrac{\partial^2\psi}{\partial\varphi^2}. \tag{4.3.11}