
8.6: Collisions of Point Masses in Two Dimensions
- Page ID
- 1542

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Learning Objectives
By the end of this section, you will be able to:
- Discuss two dimensional collisions as an extension of one dimensional analysis.
- Define point masses.
- Derive an expression for conservation of momentum along x-axis and y-axis.
- Describe elastic collisions of two objects with equal mass.
- Determine the magnitude and direction of the final velocity given initial velocity, and scattering angle.
In the previous two sections, we considered only one-dimensional collisions; during such collisions, the incoming and outgoing velocities are all along the same line. But what about collisions, such as those between billiard balls, in which objects scatter to the side? These are two-dimensional collisions, and we shall see that their study is an extension of the one-dimensional analysis already presented. The approach taken (similar to the approach in discussing two-dimensional kinematics and dynamics) is to choose a convenient coordinate system and resolve the motion into components along perpendicular axes. Resolving the motion yields a pair of one-dimensional problems to be solved simultaneously.
One complication arising in two-dimensional collisions is that the objects might rotate before or after their collision. For example, if two ice skaters hook arms as they pass by one another, they will spin in circles. We will not consider such rotation until later, and so for now we arrange things so that no rotation is possible. To avoid rotation, we consider only the scattering of point masses—that is, structureless particles that cannot rotate or spin.
We start by assuming that \(F_{net} = 0,\) so that momentum \(p\) is conserved. The simplest collision is one in which one of the particles is initially at rest. (See Figure.) The best choice for a coordinate system is one with an axis parallel to the velocity of the incoming particle, as shown in Figure. Because momentum is conserved, the components of momentum along the \(x-\) and \(y-\) axes (\(p_x \) and \(p_y\)) will also be conserved, but with the chosen coordinate system, \(p_y\) is initially zero and \(p_x\) is the momentum of the incoming particle. Both facts simplify the analysis. (Even with the simplifying assumptions of point masses, one particle initially at rest, and a convenient coordinate system, we still gain new insights into nature from the analysis of two-dimensional collisions.)
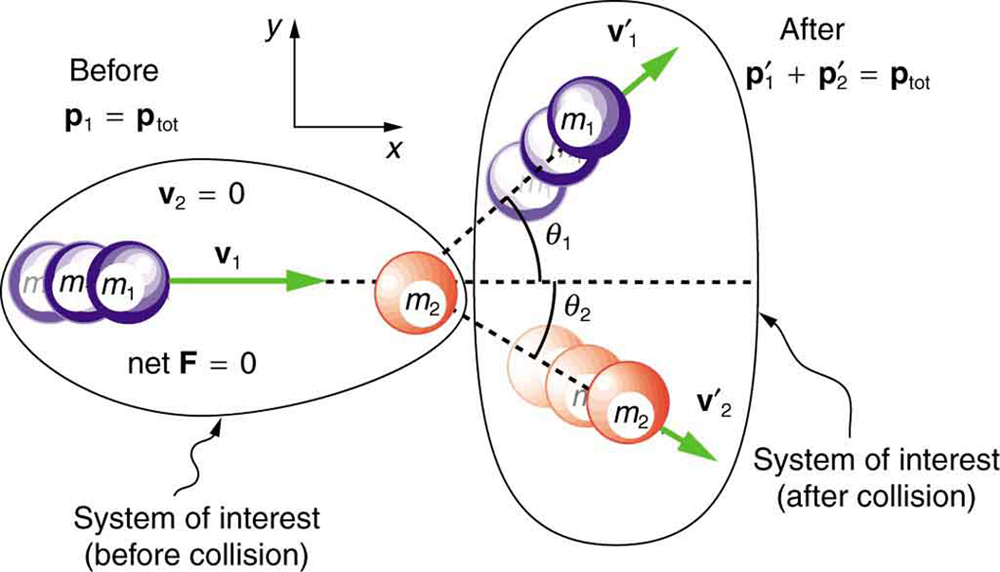
Along the \(x\)-axis, the equation for conservation of momentum is \[p_{1x} + p_{2x} = p'_{1x} + p'_{2x} .\]
Where the subscripts denote the particles and axes and the primes denote the situation after the collision. In terms of masses and velocities, this equation is \[m_1v_1 + m_2v_{2x} = m_1v'_{1x} + m_2v'_{2x}.\]
But because particle 2 is initially at rest, this equation becomes \[m_1v_1 = m_1v'_{1x} + m_2v'_{2x}.\]
The components of the velocities along the \(x\)-axis have the form \(v \, cos \, \theta\). Because particle 1 initially moves along the \(x\)-axis, we find \(v_{1x} = v_1\).
Conservation of momentum along the \(x\)-axis gives the following equation \[ m_1v_1 = m_1v'_1 \, cos \, \theta_1 + m_2v'_2 \, cos \, \theta_2,\] where \(\theta_1\) and \(\theta_2\) are as shown in Figure.
Conservation of Momentum Along the x-axis
\[ m_1v_1 = m_1v'_1 \, cos \, \theta_1 + m_2v'_2 \, cos \, \theta_2\]
Along the \(y\)-axis, the equation for conservation of momentum is \[p_{1y} + p_{2y} = p'_{1y} + p'_{2y},\] or \[m_1v_1 + m_2v_{2y} = m_1v'_{1y} + m_2v'_{2y}.\]
But \(v_{1y} \) is zero, because particle 1 initially moves along the \(x\)-axis. Because particle 2 is initially at rest, \(v_{2y}\) is also zero. The equation for conservation of momentum along the \(y\)-axis becomes \[0 = m_1v'_{1y} + m_2v'_{2y}.\]
The components of the velocities along the \(y\)-axis have the form \(v \, sin \, \theta\).
Thus, conservation of momentum along the \(y\)-axis gives the following equation: \[0 = m_1v'_{1y} \, sin \, \theta_1 + m_2v'_{2y} \, sin \, \theta_2.\]
Conservation of Momentum Along y-axis
\[0 = m_1v'_{1y} \, sin \, \theta_1 + m_2v'_{2y} \, sin \, \theta_2.\]
The equations of conservation of momentum along the \(x\)-axis and \(y\)-axis are very useful in analyzing two-dimensional collisions of particles, where one is originally stationary (a common laboratory situation). But two equations can only be used to find two unknowns, and so other data may be necessary when collision experiments are used to explore nature at the subatomic level.
Example \(\PageIndex{1}\): Determining the Final Velocity of an Unseen Object from the
Scattering of Another Object
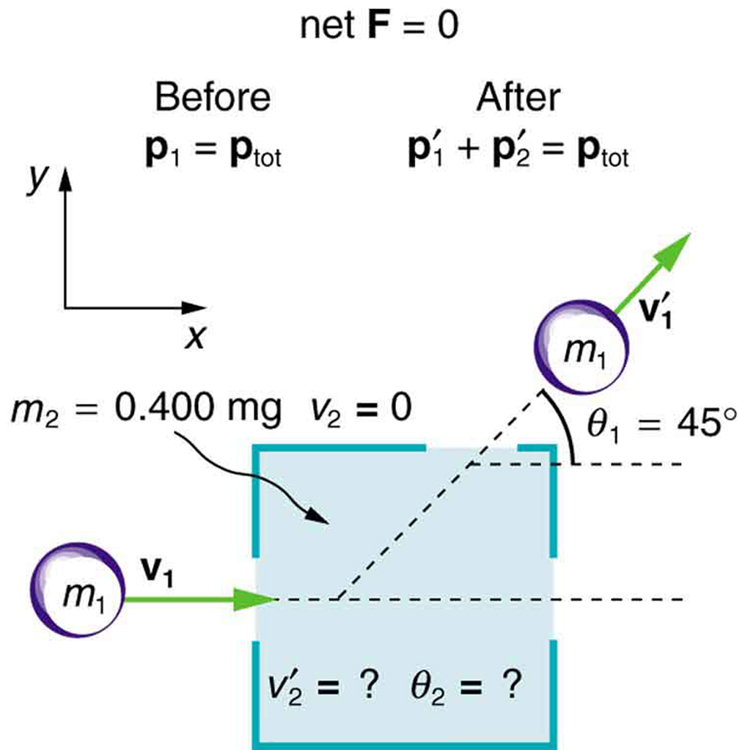
Suppose the following experiment is performed. A 0.250-kg object \((m_1)\) is slid on a frictionless surface into a dark room, where it strikes an initially stationary object with mass of 0.400 kg \((m_2)\). The 0.250-kg object emerges from the room at an angle of \(45^o\) with its incoming direction.The speed of the 0.250-kg object is originally 2.00 m/s and is 1.50 m/s after the collision. Calculate the magnitude and direction of the velocity \((v'_2\) and \(\theta_2)\) of the 0.400-kg object after the collision.
Strategy
Momentum is conserved because the surface is frictionless. The coordinate system shown in Figure is one in which \(m_2\) is originally at rest and the initial velocity is parallel to the \(x\)-axis, so that conservation of momentum along the \(x\)- and \(y\)-axes is applicable. Everything is known in these equations except \(v'_2\) and \(\theta_2\), which are precisely the quantities we wish to find. We can find two unknowns because we have two independent equations: the equations describing the conservation of momentum in the \(x\)- and \(y\)-directions.
Solution
Solving \(m_1v_1 = m_1v'_1 \, cos \, \theta_1 + m_2v'_2 \, cos \, \theta_2\) for \(v'_2 \, cos \, \theta_2\) and \(0 = m_1v'_{1y} \, sin \, \theta_1 + m_2v'_{2y} \, sin \, \theta_2\) for \(v'_2 \, sin \, \theta_2\) and taking the ratio yields an equation (in which \(\theta_2\) is the only unknown quantity. Applying the identity \(\left(tan \, \theta = \frac{sin \, \theta}{cos \, \theta} \right) \), we obtain
\[tan \, \theta_2 = \dfrac{v'_1 \, sin \, \theta_1}{v'_1 \, cos \, \theta_1 - v_1}.\]
Entering known values into the previous equation gives
\[tan \, \theta_2 = \dfrac{(1.50 \, m/s)(0.7071)}{(1.50 \, m/s)(0.7071) - 2.00 \, m/s} = -1.129.\]
Thus, \[\theta_2 = tan^{-1}9-1.129) = 311.5^o \approx 312^o.\]
Angles are defined as positive in the counter clockwise direction, so this angle indicates that \(m_2\) is scattered to the right in Figure, as expected (this angle is in the fourth quadrant). Either equation for the \(x\)- or \(y\)-axis can now be used to solve for \(v_2\), but the latter equation is easiest because it has fewer terms.
\[v'_2 = - \left( \dfrac{0.250 \, kg}{0.400 \, kg} \right) (1.50 \, m/s) \left(\dfrac{0.7071}{-0.7485} \right).\]
Thus, \[v'_2 = 0.886 \, m/s.\]
Discussion
It is instructive to calculate the internal kinetic energy of this two-object system before and after the collision. (This calculation is left as an end-of-chapter problem.) If you do this calculation, you will find that the internal kinetic energy is less after the collision, and so the collision is inelastic. This type of result makes a physicist want to explore the system further.
Elastic Collisions of Two Objects with Equal Mass
Some interesting situations arise when the two colliding objects have equal mass and the collision is elastic. This situation is nearly the case with colliding billiard balls, and precisely the case with some subatomic particle collisions. We can thus get a mental image of a collision of subatomic particles by thinking about billiards (or pool). (Refer to Figure for masses and angles.) First, an elastic collision conserves internal kinetic energy. Again, let us assume object 2 \(m_2\) is initially at rest. Then, the internal kinetic energy before and after the collision of two objects that have equal masses is
\[\dfrac{1}{2}mv_1^2 = \dfrac{1}{2}mv_1^{'2} + \dfrac{1}{2}mv_2^{'2}.\]
Because the masses are equal, \(m_1 = m_2 = m\). Algebraic manipulation (left to the reader) of conservation of momentum in the \(x\)- and \(y\)-directions can show that
\[\dfrac{1}{2}mv_1^2 = \dfrac{1}{2}mv_1^{'2} + \dfrac{1}{2}mv_2^{'2} + mv'_1 v'_2 \, cos (\theta_1 - \theta_2).\]
(Remember that \(\theta_2\) is negative here.) The two preceding equations can both be true only if \[mv'_1 v'_2 \, cos (\theta_1 - \theta_2) = 0.\]
There are three ways that this term can be zero. They are
\(v'_1 = 0\): head-on collision; incoming ball stops;
\(v'_2 = 0\): no collision; incoming ball continues unaffected
All three of these ways are familiar occurrences in billiards and pool, although most of us try to avoid the second. If you play enough pool, you will notice that the angle between the balls is very close to 90º after the collision, although it will vary from this value if a great deal of spin is placed on the ball. (Large spin carries in extra energy and a quantity called angular momentum, which must also be conserved.) The assumption that the scattering of billiard balls is elastic is reasonable based on the correctness of the three results it produces. This assumption also implies that, to a good approximation, momentum is conserved for the two-ball system in billiards and pool. The problems below explore these and other characteristics of two-dimensional collisions.
CONNECTIONS TO NUCLEAR AND PARTICLE PHYSICS
Two-dimensional collision experiments have revealed much of what we know about subatomic particles, as we shall see in Medical Applications of Nuclear Physics and Particle Physics. Ernest Rutherford, for example, discovered the nature of the atomic nucleus from such experiments.
Summary
- The approach to two-dimensional collisions is to choose a convenient coordinate system and break the motion into components along perpendicular axes. Choose a coordinate system with the x-axis parallel to the velocity of the incoming particle.
- Two-dimensional collisions of point masses where mass 2 is initially at rest conserve momentum along the initial direction of mass 1 (the x-axis), stated by \(m_1v_1=m_1v′_1cosθ_1+m_2v′_2cosθ_2\) and along the direction perpendicular to the initial direction (the y-axis) stated by \(0=m_1v′_1y+m_2v′2_y\).
- The internal kinetic before and after the collision of two objects that have equal masses is
\(\frac{1}{2}mv_1^2=\frac{1}{2}mv′_1^2+\frac{1}{2}mv′_2^2+mv′_1v′_2cos(θ_1−θ_2)\).
- Point masses are structureless particles that cannot spin.
Glossary
- point masses
- structureless particles with no rotation or spin