
10.7: Motors and Meters
- Page ID
- 46224

Learning Objectives
- Describe how motors and meters work in terms of force on a current loop.
Motors are the most common application of magnetic force on current-carrying wires. Motors have loops of wire in a magnetic field. When current is passed through the loops, the magnetic field exerts force on the loops, which rotates a shaft. Electrical energy is converted to mechanical work in the process. (See Figure \(\PageIndex{1}\).)
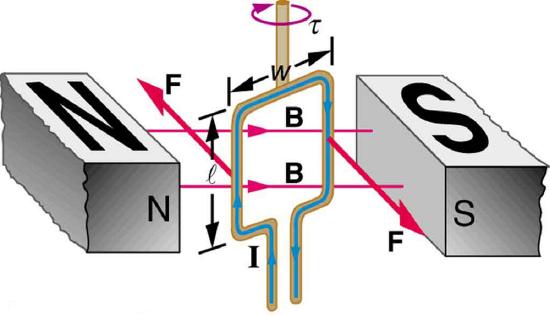
Figure \(\PageIndex{1}\): Force on a current loop. A current-carrying loop of wire attached to a vertically rotating shaft feels magnetic forces that produce a clockwise rotation as viewed from above.
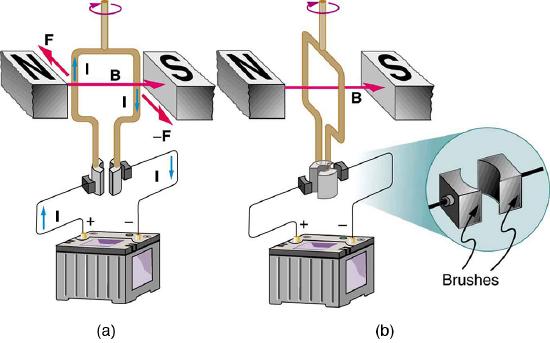
As the coil rotates, the force decreases to zero at \(\theta=0\). The force then reverses its direction once the coil rotates past \(\theta=0\). This means that, unless we do something, the coil will oscillate back and forth about equilibrium at \(\theta=0\). To get the coil to continue rotating in the same direction, we can reverse the current as it passes through \(\theta=0\) with automatic switches called brushes. (See Figure \(\PageIndex{2}\).)
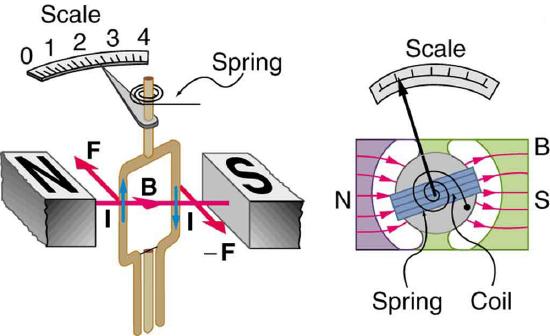
Meters, such as those in analog fuel gauges on a car, are another common application of magnetic force on a current-carrying loop. Figure \(\PageIndex{3}\) shows that a meter is very similar in construction to a motor. The meter in the figure has its magnets shaped to limit the effect of \(\theta\) by making \(B\) perpendicular to the loop over a large angular range. A linear spring exerts a counter-force that balances the current-produced force. This makes the needle deflection proportional to \(I\). If an exact proportionality cannot be achieved, the gauge reading can be calibrated. To produce a galvanometer for use in analog voltmeters and ammeters that have a low resistance and respond to small currents, we use a large loop area \(A\), high magnetic field \(B\), and low-resistance coils.
Glossary
- motor
- loop of wire in a magnetic field; when current is passed through the loops, the magnetic field exerts force on the loops, which rotates a shaft; electrical energy is converted to mechanical work in the process
- meter
- common application of magnetic force on a current-carrying loop that is very similar in construction to a motor; by design, the force is proportional to \(I\) and not \(\theta\), so the needle deflection is proportional to the current