
2.3: Torque Induced by a Magnetic Field



- Last updated
- May 9, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
A magnetic field exerts a force on current. This force is exerted in a direction perpendicular to the direction of current flow. For this reason, current-carrying structures in a magnetic field tend to rotate. A convenient description of force associated with rotational motion is torque. In this section, we define torque and apply this concept to a closed loop of current. These concepts apply to a wide range of practical devices, including electric motors.
Figure 2.3.1 illustrates the concept of torque.
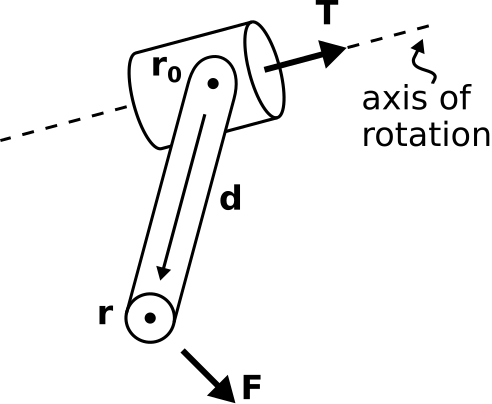 Figure 2.3.1: Torque associated with a single lever arm. ( CC BY-SA 4.0; C. Wang)
Figure 2.3.1: Torque associated with a single lever arm. ( CC BY-SA 4.0; C. Wang)
Torque depends on the following:
- A local origin r0,
- A point r which is connected to r0 by a perfectly-rigid mechanical structure, and
- The force F applied at r.
In terms of these parameters, the torque T is:
T≜
where the lever arm {\bf d} \triangleq {\bf r} - {\bf r}_0 gives the location of {\bf r} relative to {\bf r}_0. Note that {\bf T} is a position-free vector which points in a direction perpendicular to both {\bf d} and {\bf F}.
Note that {\bf T} does not point in the direction of rotation. Nevertheless, {\bf T} indicates the direction of rotation through a “right hand rule”: If you point the thumb of your right hand in the direction of {\bf T}, then the curled fingers of your right hand will point in the direction of torque-induced rotation.
Whether rotation actually occurs depends on the geometry of the structure. For example, if {\bf T} aligns with the axis of a perfectly-rigid mechanical shaft, then all of the work done by {\bf F} will be applied to rotation of the shaft on this axis. Otherwise, torque will tend to rotate the shaft in other directions as well. If the shaft is not free to rotate in these other directions, then the effective torque – that is, the torque that contributes to rotation of the shaft – is reduced.
The magnitude of {\bf T} has SI base units of N\cdotm and quantifies the energy associated with the rotational force. As you might expect, the magnitude of the torque increases with increasing lever arm magnitude \left|{\bf d}\right|. In other words, the torque resulting from a constant applied force increases with the length of the lever arm.
Torque, like the translational force \bf{F}, satisfies superposition. That is, the torque resulting from forces applied to multiple rigidly-connected lever arms is the sum of the torques applied to the lever arms individually.
Now consider the current loop shown in Figure \PageIndex{2}. The loop is perfectly rigid and is rigidly attached to a non-conducting shaft. The assembly consisting of the loop and the shaft may rotate without friction around the axis of the shaft. The loop consists of four straight segments that are perfectly-conducting and infinitesimally-thin. A spatially-uniform and static impressed magnetic flux density {\bf B}_0 = \hat{\bf x} B_0 exists throughout the domain of the problem. (Recall that an impressed field is one that exists in the absence of any other structure in the problem.) What motion, if any, is expected?
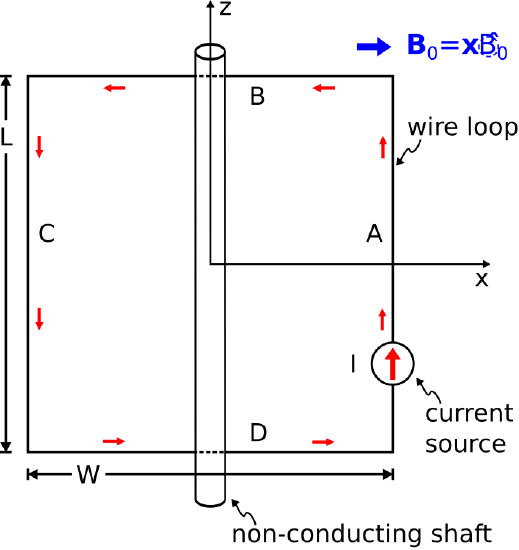 Figure \PageIndex{2}: A rudimentary electric motor consisting of a single current loop. ( CC BY-SA 4.0; C. Wang)
Figure \PageIndex{2}: A rudimentary electric motor consisting of a single current loop. ( CC BY-SA 4.0; C. Wang)
Recall that the net translational force on a current loop in a spatially-uniform and static magnetic field is zero (Section 2.2). However, this does not preclude the possibility of different translational forces acting on each of the loop segments resulting in a rotation of the shaft. Let us first calculate these forces. The force {\bf F}_A on segment A is
{\bf F}_A = I{\bf l}_A \times {\bf B}_0 \nonumber
where {\bf l}_A is a vector whose magnitude is equal to the length of the segment and which points in the direction of the current. Thus,
\begin{align} {\bf F}_A &= I\left(\hat{\bf z}L\right) \times \left( \hat{\bf x}B_0 \right) \nonumber \\ &= \hat{\bf y}ILB_0\end{align} \nonumber
Similarly, the force {\bf F}_C on segment C is
\begin{align} {\bf F}_C &= I\left(-\hat{\bf z}L\right) \times \left( \hat{\bf x}B_0 \right) \nonumber \\ &= -\hat{\bf y}ILB_0\end{align} \nonumber
The forces {\bf F}_B and {\bf F}_D on segments B and D, respectively, are:
{\bf F}_B = I\left(-\hat{\bf x}L\right) \times \left( \hat{\bf x}B_0 \right) = 0 \nonumber
and
{\bf F}_D = I\left(+\hat{\bf x}L\right) \times \left( \hat{\bf x}B_0 \right) = 0 \nonumber
Thus, the force exerted on the current loop by the impressed magnetic field will lead to rotation in the +\hat{\bf \phi} direction.
We calculate the associated torque {\bf T} as
{\bf T} = {\bf T}_A + {\bf T}_B + {\bf T}_C + {\bf T}_D \nonumber
where {\bf T}_A, {\bf T}_B, {\bf T}_C, and {\bf T}_D are the torques associated with segments A, B, C, and D, respectively. For example, the torque associated with segment A is
\begin{align} {\bf T}_A &= \frac{W}{2}\hat{\bf x} \times {\bf F}_A \nonumber \\ &= \hat{\bf z}L\frac{W}{2}IB_0 \end{align} \nonumber
Similarly,
{\bf T}_B = 0 ~\mbox{since ${\bf F}_B=0$} \nonumber
{\bf T}_C = \hat{\bf z}L\frac{W}{2}IB_0 \nonumber
{\bf T}_D = 0 ~\mbox{since ${\bf F}_D=0$} \nonumber
Summing these contributions, we find
{\bf T} = \hat{\bf z}LWIB_0 \nonumber
Note that {\bf T} points in the +\hat{\bf z} direction, indicating rotational force exerted in the +\hat{\bf \phi} direction, as expected. Also note that the torque is proportional to the area LW of the loop, is proportional to the current I, and is proportional to the magnetic field magnitude B_0.
The analysis that we just completed was static; that is, it applies only at the instant depicted in Figure \PageIndex{2}. If the shaft is allowed to turn without friction, then the loop will rotate in the +\hat{\bf \phi} direction. So, what will happen to the forces and torque? First, note that {\bf F}_A and {\bf F}_C are always in the +\hat{\bf y} and -\hat{\bf y} directions, respectively, regardless of the rotation of the loop. Once the loop rotates away from the position shown in Figure \PageIndex{2}, the forces {\bf F}_B and {\bf F}_D become non-zero; however, they are always equal and opposite, and so do not affect the rotation. Thus, the loop will rotate one-quarter turn and then come to rest, perhaps with some damped oscillation around the rest position depending on the momentum of the loop. At the rest position, the lever arms for segments A and C are pointing in the same directions as {\bf F}_A and {\bf F}_C, respectively. Therefore, the cross product of the lever arm and translational force for each segment is zero and subsequently {\bf T}_A={\bf T}_C=0. Once stopped in this position, both the net translational force and the net torque are zero.
If such a device is to be used as a motor, it is necessary to find a way to sustain the rotation. There are several ways in which this might be accomplished. First, one might make I variable in time. For example, the direction of I could be reversed as the loop passes the quarter-turn position. This reverses {\bf F}_A and {\bf F}_C, propelling the loop toward the half-turn position. The direction of I can be changed again as the loop passes half-turn position, propelling the loop toward the three-quarter-turn position. Continuing this periodic reversal of the current sustains the rotation. Alternatively, one may periodically reverse the direction of the impressed magnetic field to the same effect. These methods can be combined or augmented using multiple current loops or multiple sets of time-varying impressed magnetic fields. Using an appropriate combination of current loops, magnetic fields, and waveforms for each, it is possible to achieve sustained torque throughout the rotation. An example is shown in Figure \PageIndex{3}.
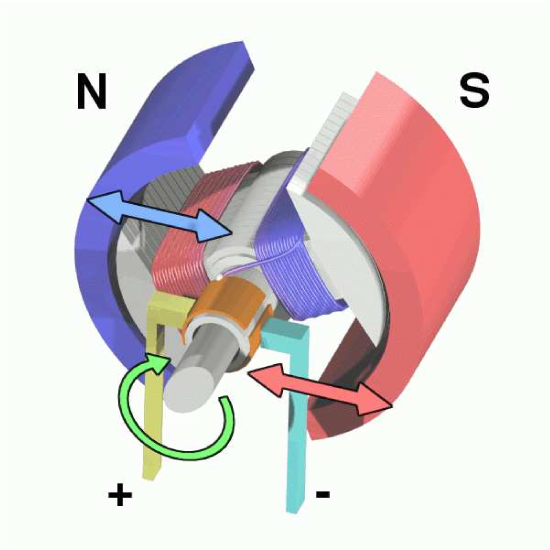 Figure \PageIndex{3}: This DC electric motor uses brushes (here, the motionless leads labeled “+” and “−”) combined with the motion of the shaft to periodically alternate the direction of current between two coils, thereby creating nearly constant torque. ( CC BY-SA 3.0; Abnormaal)
Figure \PageIndex{3}: This DC electric motor uses brushes (here, the motionless leads labeled “+” and “−”) combined with the motion of the shaft to periodically alternate the direction of current between two coils, thereby creating nearly constant torque. ( CC BY-SA 3.0; Abnormaal)
Additional Reading:
- “Torque” on Wikipedia.
- “Electric motor” on Wikipedia.