
4.4: Orbital Eigenfunctions in 3-D

( \newcommand{\kernel}{\mathrm{null}\,}\)
The Angular Momentum Operators in Spherical Polar Coordinates
The angular momentum operator
→L=→r×→p=−iℏ→r×→∇.
In spherical polar coordinates,
x=rsinθcosϕy=rsinθsinϕz=rcosθds2=dr2+r2dθ2+r2sin2θdϕ2
the gradient operator is
→∇=ˆr∂∂r+ˆθ1r∂∂θ+ˆϕ1rsinθ∂∂ϕ
where now the little hats denote unit vectors: ˆr is radially outwards, ˆθ points along a line of longitude away from the north pole (and therefore in the direction of increasing θ ) and ˆϕ points along a line of latitude in an anticlockwise direction as seen looking down on the north pole (that is, in the direction of increasing ϕ).
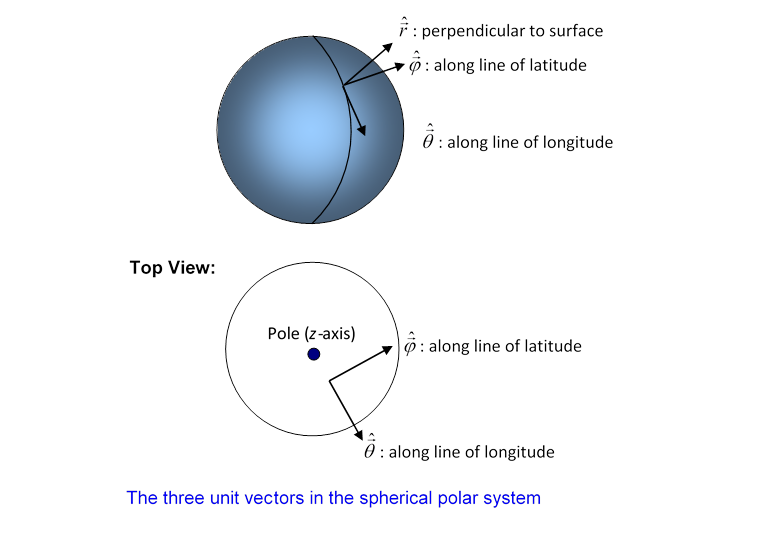
Here ˆr,ˆθ,ˆϕ form an orthonormal local basis, and
ˆr׈θ=ˆϕ,ˆr׈ϕ=−ˆθ
as should be clear from the diagram.
So
→r×→∇=ˆϕ∂∂θ−ˆθ1sinθ∂∂ϕ
(Explicitly, ˆϕ=(−sinϕ,cosϕ,0) and ˆθ=(cosθcosϕ,cosθsinϕ,−sinθ).)
The vector ˆϕ has zero component in the z-direction, the vector ˆθ has component −sinθ in the z-direction, so we can immediately conclude that
Lz=(→r×→p)z=−(iℏ→r×→∇)z=−iℏ∂∂ϕ
just as in the two-dimensional case.
The operator L2=−ℏ2(ˆϕ∂∂θ−ˆθ1sinθ∂∂ϕ)⋅(ˆϕ∂∂θ−ˆθ1sinθ∂∂ϕ).
To evaluate this expression, we use ^ϕ2=1,^θ2=1,ˆϕ⋅ˆθ=0 but we must also check the effects of the differential operators in the first expression on the variables in the second, including the unit vectors.
From the explicit coordinate expressions for the unit vectors, or by staring at the diagram, you should be able to establish the following: ∂ˆϕ/∂θ=0,∂ˆθ/∂θ is in the r-direction, ∂ˆϕ/∂ϕ is a horizontal unit vector pointing inwards perpendicular to ˆϕ, and having component −cosθ in the ˆθ-direction, ∂ˆθ/∂ϕ=ˆϕcosθ.
Therefore, the only "differentiation of a unit vector" term that contributes to L2 is
ℏ2ˆθ1sinθ⋅∂ˆϕ∂ϕ∂∂θ=−ℏ2cotθ∂∂θ.
The ˆϕ∂∂θ acting on the sinθ in −ˆθ1sinθ∂∂ϕ contributes nothing because ˆϕ⋅ˆθ=0.
Hence
L2=−ℏ2(∂2∂θ2+cotθ∂∂θ+1sin2θ∂2∂ϕ2)=−ℏ2(1sinθ∂∂θsinθ∂∂θ+1sin2θ∂2∂ϕ2)
Now, we know that L2 and Lz have a common set of eigenkets (since they commute) and we've already established that those of Lz are Φm(ϕ)=eimϕ/√2π, with m an integer, so the eigenkets of L2 must have this same f dependence, so they must be of the form Θml(θ)Φ(ϕ), where Θml(θ) is a (suitably normalized) solution of the equation
1sinθddθsinθdΘml(θ)dθ−m2sin2θΘml(θ)=−l(l+1)Θml(θ)
more conveniently written sinθddθsinθdΘml(θ)dθ+(l(l+1)sin2θ−m2)Θml(θ)=0.
To summarize: the solutions to this differential equation, with integer l,m,|m|≤l, will (together with Φm(ϕ)) give the complete set of eigenstates of L2, Lz in the coordinate representation.
Finding the m = l Eigenket of L2, Lz
Recall now that for the simple harmonic oscillator, the easiest wave function to find was that of the ground state, the solution of the simple linear equation ˆaΨ0=0 (as well as being a solution of the quadratic Schrödinger equation, of course). The other state wave functions could then be found by applying the creation operator in differential form the necessary number of times.
A similar strategy works here: we can easily find the highest state on the l ladder, m=l, the state |l,l⟩, since it satisfies the linear equation L+|l,l⟩=0, where L+=Lx+iLy. We just need to cast this equation in coordinate form. In Cartesian coordinates, L+=−iℏ(ˆr×→∇)+, and we've already shown that
→r×→∇=ˆϕ∂∂θ−ˆθ1sinθ∂∂ϕ.
Therefore (→r×→∇)+=^ϕ+∂∂θ−^θ+1sinθ∂∂ϕ,
and using ˆϕ=(−sinϕ,cosϕ,0), ˆθ=(cosθcosϕ,cosθsinϕ,−sinθ we see that ^θ+, the component of ˆθ in the + direction, is ϕ+=ϕx+iϕy=ieiϕ, and similarly ^θ+=cosθeiϕ.
So L+=ℏeiϕ(∂∂θ+icotθ∂∂ϕ)L−=−ℏe−iϕ(∂∂θ−icotθ∂∂ϕ)
and L+|l,l⟩=0 becomes (∂∂θ+icotθ∂∂ϕ)Θll(θ)eilϕ=0
That is, (ddθ−lcotθ)Θll(θ)=0
The solution to this equation is Θll(θ)=N(sinθ)l
where N is the normalization constant. The m≠l wave functions are generated by applying the lowering operator L−.
Normalizing the m = l Eigenket
The standard notation for the normalized eigenkets |l,m⟩ is Yml(θ,ϕ)=Θml(θ)Φm(ϕ). These functions, being eigenkets of Hermitian operators with different eigenvalues, must satisfy ∫πθ=0∫2πϕ=0Ym′∗l′(θ,ϕ)Yml(θ,ϕ)sinθdθdϕ=∫Ym′∗l′(θ,ϕ)Yml(θ,ϕ)dΩ=δl′lδm′m.
So, our first job is to normalize Θll(θ)=N(sinθ)l (taking Φl(ϕ)=eilϕ/√2π already normalized) |N|2∫π0(sinθ)2l+1dθ=1
The integral can be evaluated using the substitution μ=cosθ to give ∫1−1(1−μ2)ldμ, then making the further substitution u=12(1−μ) to give 22l+1∫10ul(1−u)ldu, which can be integrated by parts to give |N|222l+1(l!)2/(2l+1)!=1.
Therefore Yll(θ,ϕ)=(−1)l((2l+1)!4π)1/212ll!(sinθ)leilϕ=cl(sinθ)leilϕ
where we have fixed the sign in accord with the standard convention, and we will denote the rather cumbersome normalization constant by cl.
Notice that for large values of l, this function is heavily weighted around the equator, as we would expect -- for a given total angular momentum one gets a maximum component in the z-direction when the motion is concentrated in the x, y plane. This looks like a Bohr orbit.
Finding the Rest of the Eigenkets: the Details
Now that |l,l⟩ is normalized, we can automatically produce correctly normalized |l,m⟩'s, since we know the matrix element of the lowering operator between normalized states. We don't have to do any more integrals.
For example, L−|l,l⟩=ℏ√2l|l,l−1⟩, equivalently (the ℏ's of course cancel) Yl−1l(θ,ϕ)=(−1)√2le−iϕ(∂∂θ−icotθ∂∂ϕ)Yll.
That is, Yl−1l(θ,ϕ)=cle−iϕ(∂∂θ−icotθ∂∂ϕ)sinlθ⋅eilϕ=−clei(l−1)ϕ√2lsinl−1θcosθ
(both terms giving equal contributions).
Note that this function is actually zero on the equator, but for large l it peaks close to the equator (on both sides).
In principle, we can reapply this differential operator over and over to generate all the |l,m⟩ states, but this gets very messy. However, there is a neat theorem concerning the lowering operator that makes it all straightforward: L−eimϕf(θ)=ei(m−1)ϕ(sin1−mθdd(cosθ)sinmθ)f(θ)
Exercise: prove this.
So L−eilϕsinlθ=ei(l−1)ϕ(sin1−lθdd(cosθ)sinlθ)sinl(θ)
and applying the operator again, \boldsymbol{\begin{matrix} (L_-)^2e^{il\phi}\sin^l\theta=L_-e^{i(l-1)\phi}\left( \sin^{1-l}\theta\dfrac{d}{d(\cos\theta)}\sin^l\theta \right) \sin^l(\theta) \\ =e^{i(l-2)\phi}\left( \sin^{2-l}\theta\dfrac{d}{d(\cos\theta)}\sin^{l-1}\theta \right) \cdot\left( \sin^{1-l}\theta\dfrac{d}{d(\cos\theta)}\sin^l\theta \right) \sin^l(\theta) \\ =e^{i(l-2)\phi}\left( \sin^{2-l}\theta\dfrac{d^2}{d^2(\cos\theta)}\sin^l\theta \right) \sin^l(\theta). \end{matrix} \label{4.4.23}}
So the point of introducing this odd-looking representation of the lowering operator is that the sin1−lθ term in the middle is exactly canceled when the operator is applies twice, and similar cancellations occur on repeating the operation, giving the (relatively) simple representation: Yml(θ,ϕ)=cl√(l+m)!(2l)!(l−m)!eimϕsin−mθdl−md(cosθ)l−msin2lθ
(Where did all those factorials come from? They're the product of all the inverse square root factors in |l,m−1⟩=1√(l+m)(l−m+1)L−|l,m⟩
for the number of lowerings necessary.)
Note that for m=0 the function is Y0l(θ,ϕ)=cl√1(2l)!dld(cosθ)lsin2lθ,
and in fact not a function of ϕ at all. This isn't surprising, since it has zero angular momentum about the z-direction, the appropriate Φ(ϕ) is just constant.
For m=−l, the differentiation becomes trivial, because, writing cosθ=μ, the differentiation becomes d2ldμ2l(1−μ2)l and only the μ2l term survives, giving Y−ll(θ,ϕ)=(−1)lcle−ilϕsinlθ.
Of course, this could also have been found from the linear equation L−|l,−l⟩=0, and we could have equally generated all the states by applying L+ to this state. In fact, this gives a different -- but of course equivalent -- expression for the Yml(θ,ϕ): Yml(θ,ϕ)=(−1)mcl√(l−m)!(2l)!(l+m)!eimϕsinmθdl+md(cosθ)l+msin2lθ
(from Messiah, page 522).
Relating the Yl m's to the Legendre Functions
The Legendre polynomials Pn(cosθ) are defined by: Pn(cosθ)=12nn!dnd(cosθ)nsin2nθ,orPn(μ)=12nn!dndμn(1−μ2)n
where μ=cosθ, so dμ=−sinθdθ. From this form, it is easy to show that Pn(1)=1 (all n differentiations must take out a (1−μ2) factor to give a nonzero contribution), and Pn(μ) must have n zeros in the interval (-1, 1). Pn(μ) alternates between an even function and an odd function.
The normalization of the Pn(μ)'s is ∫1−1(Pn(μ))2dμ=(12nn!)2∫1−1dndμn(μ2−1)ndndμn(μ2−1)ndμ=(−1)n(12nn!)2∫1−1(μ2−1)nd2ndμ2n(μ2−1)ndμ=(2n)!(12nn!)2∫1−1(μ2−1)ndμ=22n+1
where in that last line we used the result for the integral obtained earlier in this lecture for normalizing Yll.
Doing the same repeated integration by parts for two different Legendre polynomials proves they are orthogonal, ∫1−1Pm(μ)Pn(μ)dμ=0,m≠n
The associated Legendre functions are defined (for n and m zero or positive integers, n≥m![]() ) by: Pmn(μ)=(1−μ2)m/2dmdμmPn(μ)=(−1)n(1−μ2)m/22nn!dn+mdμn+m(1−μ2)n.
) by: Pmn(μ)=(1−μ2)m/2dmdμmPn(μ)=(−1)n(1−μ2)m/22nn!dn+mdμn+m(1−μ2)n.
Following Messiah in requiring Y0l(0,0) be real and positive, we find Y0l(θ,ϕ)=√2l+14πPl(cosθ)
where the coefficient just reflects the differing normalization conventions. Similarly, the spherical harmonics with nonzero m are proportional to the associated Legendre functions (the odd ones are not polynomials in cosθ, despite Shankar p. 337, since they include odd powers of sinθ), Yml(θ,ϕ)=√(2l+1)(l−m)!4π(l+m)!(−1)meimϕPml(cosθ).
The Spherical Harmonics as a Basis
We have found explicit expressions for the spherical harmonics: an orthonormal set of eigenfunctions of L2 and Lz defined on the surface of a sphere, \boldsymbol{\int^{\pi}_{\theta=0}\int^{2\pi}_{\phi=0} Y^{m'^{*}}_{l'}(\theta,\phi)Y^m_l(\theta,\phi)\sin\theta d\theta d\phi=\int Y^{m'^*}_{l'}(\theta,\phi)Y^m_l(\theta,\phi)d\Omega=\delta_{l'l}\delta_{m'm} \; . \label{4.4.16}}
They form a complete set: ∞∑l=0l∑m=−l|l,m⟩⟨l,m|=I
or ∞∑l=0l∑m=−lYm∗l(θ,ϕ)Yml(θ′,ϕ′)=δ(cosθ−cosθ′)δ(ϕ−ϕ′)=δ(Ω−Ω′)
in the notation of Messiah, where W refers to a point on the spherical surface.
(Formal proof of the completeness is given in Byron and Fuller, Mathematics of Classical and Quantum Physics.)
The above equation could also be written ∞∑l=0l∑m=−l⟨θ,ϕ|l,m⟩⟨l,m|θ′,ϕ′⟩=⟨θ,ϕ|θ′,ϕ′⟩=δ(cosθ−cosθ′)δ(ϕ−ϕ′)
where the ket |θ′,ϕ′⟩ is to be understood as a localized ket, the spherical-surface version of |x⟩, normalized by its delta function inner product with the bra ⟨θ,ϕ|, exactly analogous to ⟨x|x′⟩=δ(x−x′), bearing in mind that the infinitesimal area element is −d(cosθ)dϕ, (a positive quantity in the relevant interval, 0 to π).
This completeness means that any reasonable function on the surface of the sphere can be expressed as a sum over spherical harmonics with appropriate coefficients, in other words the spherical generalization of a Fourier series.
In fact, L2 is equivalent to ∇2 on the spherical surface, so the Yml are the eigenfunctions of the operator ∇2. Just as in one dimension the eigenfunctions of d2/dx2 have the spatial dependence of the eigenmodes of a vibrating string, the spherical harmonics have the spatial dependence of the eigenmodes of a vibrating spherical balloon. Of course, to describe the displacement of the balloon skin (which must be real!) with these eigenfunctions, we can no longer use the eigenfunctions of the z-component of angular momentum, since they are complex except in the trivial zero case. We must rearrange the eigenfunctions of L2, for example replacing the pair eiϕ,e−iϕ with cosϕ,sinϕ. These real solutions, essentially 1√2(|l,l⟩±|l,−l⟩)
, have l nodal lines (zeroes) of longitude. Moving down one notch in |m|, the (real) state with |m|=l−1 has l−1 longitudinal nodes, but has added a latitudinal node: the equator. Then |m|=l−2 has l−2 longitudinal nodes, 2 latitudinal nodal lines -- there are always l nodal lines total.
Some of these modes of vibration have been observed in the sun after a sunspot storm. The spherical harmonics are also used in analyzing the cosmic background radiation.
Some Low Order Spherical Harmonics
Let's look in more detail at the lowest order spherical harmonics. For the first few, the normalization of the highest state |l,l⟩ is pretty easy to do from scratch: factoring out the ϕ dependence as before, Yml(θ,ϕ)=Θml(θ)Φm(ϕ), and taking the normalized Φm(ϕ)=eimϕ/√2π, the θ normalization for |l,l⟩ is just
\boldsymbol{|N|^2\int^{\pi}_0 (\sin\theta)^{2l+1}d\theta=1 \label{4.4.17}}
This is easily accomplished for l=0,1,2.
All we then need is L±=±ℏe±iϕ(∂∂θ±icotθ∂∂ϕ)
, L−|l,m⟩=ℏ√l(l+1)−m(m−1)|l,m−1⟩
, and finally the sign convention that Y0l(0,0) be real and positive.
With a few elementary steps, it can be established that: Y00=1√4πY11=−√38πsinθeiϕY01=√34πcosθY−11=√38πsinθe−iϕ
Y22=√1532πsin2θe2iϕ,Y12=−√158πsinθcosθeiϕ,Y02=√516π(3cos2θ−1)Y−22=√1532πsin2θe−2iϕ,Y−12=√158πsinθcosθe−iϕ,
<
It is often useful to write the Yml in terms of Cartesian coordinates, (x,y,z)=(rsinθcosϕ,rsinθsinϕ,rcosθ)
so Y11(x,y,z)=−√38π⋅x+iyr,Y01(x,y,z)=√34π⋅zr,Y−11(x,y,z)=√38π⋅x−iyr
and Y22=√1532π(x+iy)2r2,Y12=−√158π(x+iy)zr2,Y02=√516π(3z2−1)r2,etc.
The Y1m as a Basis of the l = 1 Subspace
The Ym1 are the l=1 eigenstates of L2 and Lz. But what if we'd chosen to look for the common eigenstates of L2 and Lx instead? What l=1 state has zero angular momentum component in the direction of the x-axis? Clearly it will be √34π⋅xr
, in other words the previous Y01 with z replaced by x, because after all, our labeling of axes was arbitrary.
Now, √34π⋅xrisjust(1/√2)(−Y11+Y−11).
In fact, any l=1 state, with a specified component in any direction, can be written as α1|1,1⟩+α0|1,0⟩+α−1|1,−1⟩=∑αm|1,m⟩.
This can be seen as follows: an l=1 state has to be linear in x/r,y/r,z/r (any quadratic term would give rise to e2iϕ about an appropriate axis, call that the z-axis, so m=2 and l must be 2 or greater), and any such state can be written as a linear combination of (x+iy)/√2r,(x−iy)/√2r,z/r
The bottom line, then, is that the Ym1 do indeed provide a complete basis for the l=1 space of eigenstates of L2.
Representing the Rotation Operator Within the l = 1 Subspace
Recall that we originally introduced the angular momentum operator →J by defining it as the generator of infinitesimal rotations when acting on any wave function, including multicomponent wave functions. We found, using the commutativity properties of ordinary rotations, that the vector components of →J had to satisfy [Jx,Jy]=iℏJz, etc., and from that we deduced the possible sets of eigenvalues of the commuting pair of operators →J2, Jz were j(j+1)ℏ2 for →J2, with j an integer of half an odd integer, and for each such j the allowed eigenvalues of Jz were
mℏ,m=−j,−j+1,…,+j.
Back to the l=1 angular wave functions: we have established that any such function can be written
α1|1,1⟩+α0|1,0⟩+α−1|1,−1⟩=∑αm|1,m⟩.
and so is a vector in a three-dimensional space spanned by the set |1,m⟩,m=1,0,−1. In other words, the wave function is a three-component object. The angular momentum operator must therefore be a matrix operator in this three-dimensional space, such that, by definition, the effect of an infinitesimal rotation on the multicomponent wave function is:
R(δ→θ)Ψl=1(θ,ϕ)=e−iℏδ→θ⋅ˆ→J(α1α0α−1)=(α′1α′0α′−1)
The unitary rotation operator acting in the l=1 subspace,
U(R(→θ))=e−i→θ⋅→Jℏ
, has to be a 3×3 matrix. The standard notation for its matrix elements is:
D(1)m′m(R(→θ))=⟨1,m′|e−i→θ⋅→Jℏ|1,m⟩
so the rotated ket is
α′m′=∑m′,mD(1)m′mαm,orα′=Dα
To evaluate this matrix explicitly, we must expand the exponential and we need the matrix elements of Jz, J+, J− between the states |1,m⟩ -- which we already know.
Now, the basis of the three-dimensional space is just the common eigenkets of →J2, Jz, in this case identical to →L2, Lz. We know the matrix elements of Jz, J+, J− between states |j,m⟩ from the earlier lecture, so it is simple to find the matrix representations of the components of J in this space:
J(1)x=ℏ√2(010101010),J(1)y=iℏ√2(0−1010−1010),J(1)z=ℏ(10000000−1).
We have added the superscript (1) because this representation of the infinitesimal rotation operators is specific to j=1 (representations for general values of j are as (2j+1)×(2j+1) matrices, reflecting the dimensionality of the space spanned by the 2j+1 distinct m values).
Expanding the exponential is not difficult, because by inspection (J(1)z/ℏ)3=(J(1)z/ℏ), so from spherical symmetry (ˆ→n⋅→J(1)/ℏ)3=(ˆ→n→J(1)/ℏ) for a unit vector in any direction. The result is:
D(1)(R(→θ))=e−iθˆ→n⋅→Jℏ=I+(cosθ−1)(ˆ→n⋅→Jℏ)2−isinθ(ˆ→n⋅→Jℏ).
One other point we should note: at the end of the linear algebra lecture, we discussed rotations about the z-axis in ordinary (x, y, z) space. Obviously, if we label a point in the (x, y) plane using the complex number x+iy, a rotation by an angle θ about the z-axis will move the point in such a way that the new label is eiθ(x+iy). The angle in this case has the opposite sign to that given by the operator above: the reason is that when we write the eigenstate as −√38π⋅x+iyr
this is a function of position in the plane, not a point in the plane, so for the reasons discussed at the beginning of the first Angular Momentum lecture, the sign is opposite.