
2.3: Representation of Waves via Complex Functions

( \newcommand{\kernel}{\mathrm{null}\,}\)
In mathematics, the symbol i is conventionally used to represent the square-root of minus one: in other words, one of the solutions of i2=−1. Now, a real number, x (say), can take any value in a continuum of different values lying between −∞ and +∞. On the other hand, an imaginary number takes the general form iy, where y is a real number. It follows that the square of a real number is a positive real number, whereas the square of an imaginary number is a negative real number. In addition, a general complex number is written z=x+iy,
Just as we can visualize a real number as a point lying on an infinite straight-line, we can visualize a complex number as a point lying in an infinite plane. The coordinates of the point in question are the real and imaginary parts of the number: that is, z≡(x,y). This idea is illustrated in Figure [f13.2]. The distance, r=(x2+y2)1/2, of the representative point from the origin is termed the modulus of the corresponding complex number, z. This is written mathematically as |z|=(x2+y2)1/2. Incidentally, it follows that zz∗=x2+y2=|z|2. The angle, θ=tan−1(y/x), that the straight-line joining the representative point to the origin subtends with the real axis is termed the argument of the corresponding complex number, z. This is written mathematically as arg(z)=tan−1(y/x). It follows from standard trigonometry that x=rcosθ, and y=rsinθ. Hence, z=rcosθ+irsinθ.
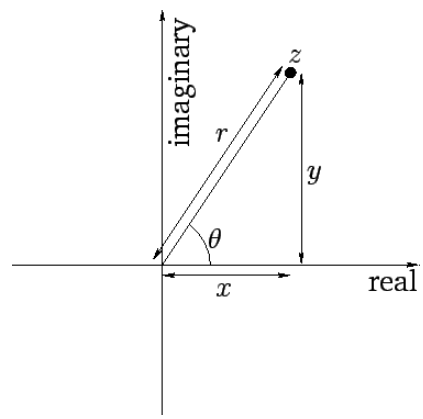
Figure 3: Representation of a complex number as a point in a plane.
Complex numbers are often used to represent wavefunctions. All such representations depend ultimately on a fundamental mathematical identity, known as Euler’s theorem , that takes the form eiϕ≡cosϕ+isinϕ,
A one-dimensional wavefunction takes the general form
Contributors and Attributions
Richard Fitzpatrick (Professor of Physics, The University of Texas at Austin)