
15.5: Pendulums


- Last updated
- Mar 16, 2025
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
- State the forces that act on a simple pendulum
- Determine the angular frequency, frequency, and period of a simple pendulum in terms of the length of the pendulum and the acceleration due to gravity
- Define the period for a physical pendulum
- Define the period for a torsional pendulum
Pendulums are in common usage. Grandfather clocks use a pendulum to keep time and a pendulum can be used to measure the acceleration due to gravity. For small displacements, a pendulum is a simple harmonic oscillator.
The Simple Pendulum
A simple pendulum is defined to have a point mass, also known as the pendulum bob, which is suspended from a string of length L with negligible mass (Figure 15.5.1). Here, the only forces acting on the bob are the force of gravity (i.e., the weight of the bob) and tension from the string. The mass of the string is assumed to be negligible as compared to the mass of the bob.
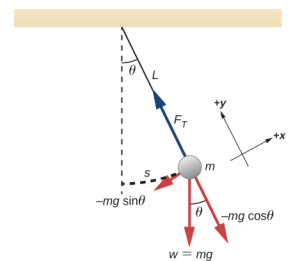
Consider the torque on the pendulum. The force providing the restoring torque is the component of the weight of the pendulum bob that acts along the arc length. The torque is the length of the string L times the component of the net force that is perpendicular to the radius of the arc. The minus sign indicates the torque acts in the opposite direction of the angular displacement:
τ=−L(mgsinθ);Iα=−L(mgsinθ);Id2θdt2=−L(mgsinθ);mL2d2θdt2=−L(mgsinθ);d2θdt2=−gLsinθ.
The solution to this differential equation involves advanced calculus, and is beyond the scope of this text. But note that for small angles (less than 15°), sin θ and θ differ by less than 1%, so we can use the small angle approximation sin θ ≈ θ. The angle θ describes the position of the pendulum. Using the small angle approximation gives an approximate solution for small angles,
d2θdt2=−gLθ.
Because this equation has the same form as the equation for SHM, the solution is easy to find. The angular frequency is
ω=√gL
and the period is
T=2π√Lg.
The period of a simple pendulum depends on its length and the acceleration due to gravity. The period is completely independent of other factors, such as mass and the maximum displacement. As with simple harmonic oscillators, the period T for a pendulum is nearly independent of amplitude, especially if θ is less than about 15°. Even simple pendulum clocks can be finely adjusted and remain accurate.
Note the dependence of T on g. If the length of a pendulum is precisely known, it can actually be used to measure the acceleration due to gravity, as in the following example.
What is the acceleration due to gravity in a region where a simple pendulum having a length 75.000 cm has a period of 1.7357 s?
Strategy
We are asked to find g given the period T and the length L of a pendulum. We can solve T = 2πL g for g, assuming only that the angle of deflection is less than 15°.
Solution
- Square T = 2π√Lg and solve for g: g=4π2LT2ldotp
- Substitute known values into the new equation: g=4π20.75000m(1.7357s)2.
- Calculate to find g: g=9.8281m/s2.
Significance
This method for determining g can be very accurate, which is why length and period are given to five digits in this example. For the precision of the approximation sin θ ≈ θ to be better than the precision of the pendulum length and period, the maximum displacement angle should be kept below about 0.5°.
An engineer builds two simple pendulums. Both are suspended from small wires secured to the ceiling of a room. Each pendulum hovers 2 cm above the floor. Pendulum 1 has a bob with a mass of 10 kg. Pendulum 2 has a bob with a mass of 100 kg. Describe how the motion of the pendulums will differ if the bobs are both displaced by 12°.
Physical Pendulum
Any object can oscillate like a pendulum. Consider a coffee mug hanging on a hook in the pantry. If the mug gets knocked, it oscillates back and forth like a pendulum until the oscillations die out. We have described a simple pendulum as a point mass and a string. A physical pendulum is any object whose oscillations are similar to those of the simple pendulum, but cannot be modeled as a point mass on a string, and the mass distribution must be included into the equation of motion.
As for the simple pendulum, the restoring force of the physical pendulum is the force of gravity. With the simple pendulum, the force of gravity acts on the center of the pendulum bob. In the case of the physical pendulum, the force of gravity acts on the center of mass (CM) of an object. The object oscillates about a point O. Consider an object of a generic shape as shown in Figure 15.5.2.
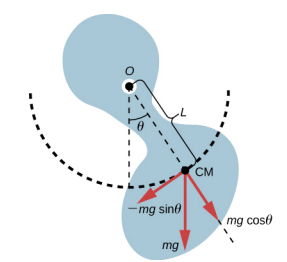
When a physical pendulum is hanging from a point but is free to rotate, it rotates because of the torque applied at the CM, produced by the component of the object’s weight that acts tangent to the motion of the CM. Taking the counterclockwise direction to be positive, the component of the gravitational force that acts tangent to the motion is −mg sin θ. The minus sign is the result of the restoring force acting in the opposite direction of the increasing angle. Recall that the torque is equal to →τ=→r×→F. The magnitude of the torque is equal to the length of the radius arm times the tangential component of the force applied, |τ| = rFsinθ. Here, the length L of the radius arm is the distance between the point of rotation and the CM. To analyze the motion, start with the net torque. Like the simple pendulum, consider only small angles so that sin θ ≈ θ. Recall from Fixed-Axis Rotation on rotation that the net torque is equal to the moment of inertia I = ∫r2 dm times the angular acceleration α, where \(\alpha = \frac{d^{2} \theta}{dt^{2}}:
Iα=τnet=L(−mg)sinθ.
Using the small angle approximation and rearranging:
Iα=−L(mg)θ;Id2θdt2=−L(mg)θ;d2θdt2=−(mgLI)θ.
Once again, the equation says that the second time derivative of the position (in this case, the angle) equals minus a constant (−mgLI) times the position. The solution is
θ(t)=Θcos(ωt+ϕ),
where Θ is the maximum angular displacement. The angular frequency is
ω=√mgLI.
The period is therefore
T=2π√ImgL.
Note that for a simple pendulum, the moment of inertia is I = ∫r2dm = mL2 and the period reduces to T = 2π√Lg.
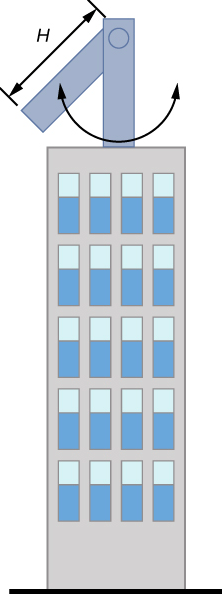
In extreme conditions, skyscrapers can sway up to two meters with a frequency of up to 20.00 Hz due to high winds or seismic activity. Several companies have developed physical pendulums that are placed on the top of the skyscrapers. As the skyscraper sways to the right, the pendulum swings to the left, reducing the sway. Assuming the oscillations have a frequency of 0.50 Hz, design a pendulum that consists of a long beam, of constant density, with a mass of 100 metric tons and a pivot point at one end of the beam. What should be the length of the beam?
Strategy
We are asked to find the length of the physical pendulum with a known mass. We first need to find the moment of inertia of the beam. We can then use the equation for the period of a physical pendulum to find the length.
Solution
- Find the moment of inertia for the CM.
- Use the parallel axis theorem to find the moment of inertia about the point of rotation: I=ICM+L24M=112ML2+14ML2=13ML2.
- The period of a physical pendulum has a period of T = 2π√ImgL. Use the moment of inertia to solve for the length L: T=2π√ImgL=2π√13ML2MgL=2π√L3g;L=3g(T2π)2=3(9.8m/s2)(2s2π)2=2.98m.
- This length L is from the center of mass to the axis of rotation, which is half the length of the pendulum. Therefore the length H of the pendulum is: H=2L=5.96m
Significance
There are many ways to reduce the oscillations, including modifying the shape of the skyscrapers, using multiple physical pendulums, and using tuned-mass dampers.
Torsional Pendulum
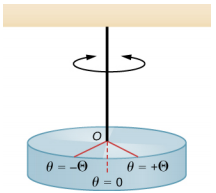
A torsional pendulum consists of a rigid body suspended by a light wire or spring (Figure 15.5.3). When the body is twisted some small maximum angle (Θ) and released from rest, the body oscillates between (θ = + Θ) and (θ = − Θ). The restoring torque is supplied by the shearing of the string or wire.
The restoring torque can be modeled as being proportional to the angle:
τ=−κθ.
The variable kappa (κ) is known as the torsion constant of the wire or string. The minus sign shows that the restoring torque acts in the opposite direction to increasing angular displacement. The net torque is equal to the moment of inertia times the angular acceleration:
Id2θdt2=−κθ;d2θdt2=−κIθ.
This equation says that the second time derivative of the position (in this case, the angle) equals a negative constant times the position. This looks very similar to the equation of motion for the SHM d2xdt2 = − kmx, where the period was found to be T = 2π√mk. Therefore, the period of the torsional pendulum can be found using
T=2π√Iκ.
The units for the torsion constant are [κ] = N • m = (kg • m/s2)m = kg • m2/s2 and the units for the moment of inertial are [I] = kg • m2, which show that the unit for the period is the second.
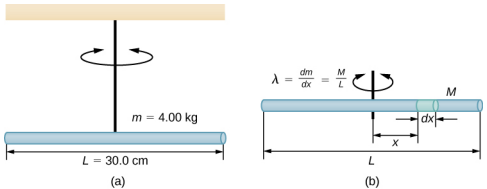
A rod has a length of l = 0.30 m and a mass of 4.00 kg. A string is attached to the CM of the rod and the system is hung from the ceiling (Figure 15.5.4). The rod is displaced 10° from the equilibrium position and released from rest. The rod oscillates with a period of 0.5 s. What is the torsion constant κ?
Strategy
We are asked to find the torsion constant of the string. We first need to find the moment of inertia.
Solution
- Find the moment of inertia for the CM: ICM=∫x2dm=∫+L2−L2x2λdx=λ[x33]+L2−L2=λ2L324=(ML)2L324=112ML2.
- Calculate the torsion constant using the equation for the period: T=2π√Iκ;κ=I(2πT)2=(112ML2)(2πT)2;=[112(4.00kg)(0.30m)2](2π0.50s)2=4.73N⋅m.
Significance
Like the force constant of the system of a block and a spring, the larger the torsion constant, the shorter the period.