
15A: Newton’s Laws #2: Kinds of Forces, Creating Free Body Diagrams
- Page ID
- 2495

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)There is no “force of motion” acting on an object. Once you have the force or forces exerted on the object by everything (including any force-per-mass field at the location of the object) that is touching the object, you have all the forces. Do not add a bogus “force of motion” to your free body diagram. It is especially tempting to add a bogus force when there are no actual forces in the direction in which an object is going. Keep in mind, however, that an object does not need a force on it to keep going in the direction in which it is going; moving along at a constant velocity is what an object does when there is no net force on it.
Now that you’ve had some practice using free body diagrams it is time to discuss how to create them. As you draw a free body diagram, there are a couple of things you need to keep in mind:
- Include only those forces acting ON the object whose free body diagram you are drawing. Any force exerted BY the object on some other object belongs on the free body diagram of the other object.
- All forces are contact forces and every force has an agent. The agent is “that which is exerting the force.” In other words, the agent is the life form or thing that is doing the pushing or pulling on the object. No agent can exert a force on an object without being in contact with the object. (We are using the field point of view, rather than the action-at-adistance point of view for the fundamental forces of nature. Thus, for instance, it is the earth’s gravitational field at the location of the object, rather than the material earth itself, that exerts the gravitational force on an object.)
We are going to introduce the various kinds of forces by means of examples. Here is the first example:
A rock is thrown up into the air by a person. Draw the free body diagram of the rock while it is up in the air. (Your free body diagram is applicable for any time after the rock leaves the thrower’s hand, until the last instant before the rock makes contact with whatever it is destined to hit.) Neglect any forces that might be exerted on the rock by the air.
Solution
If you see the rock flying through the air, it may very well look to you like there is nothing touching the rock. But the earth’s gravitational field is everywhere in the vicinity of the earth. It can’t be blocked. It can’t be shielded. It is in the air, in the water, even in the dirt. It is in direct contact with everything in the vicinity of the earth. It exerts a force on every object near the surface of the earth. We call that force the gravitational force. You have already studied the gravitational force. We give a brief synopsis of it here.
Because it has mass, the earth has a gravitational field. The gravitational field is a force-per-mass field. It is invisible. It is not matter. It is an infinite set of force-per-mass vectors, one at every point in space in the vicinity of the surface of the earth. Each force-per-mass vector is directed downward, toward the center of the earth and, near the surface of the earth, has a magnitude of \(9.80\dfrac{N}{kg}\). The symbol used to represent the earth’s gravitational field vector at any point where it exists is \(\vec{g}\). Thus, \(\vec{g}=9.80\dfrac{N}{kg}\) Downward. The effect of the earth’s gravitational field is to exert a force on any object that is in the earth’s gravitational field. The force is called the gravitational force and is equal to the product of the mass of the object and the earth’s gravitational field vector: \(F_g=m\vec{g}\). The magnitude of the gravitational force is given by
\[F_g=mg\label{15-1} \]
where \(g=9.80\dfrac{N}{kg}\) is the magnitude of the earth’s gravitational field vector. The direction of the near-earth’s-surface gravitational force is downward, toward the center of the earth.
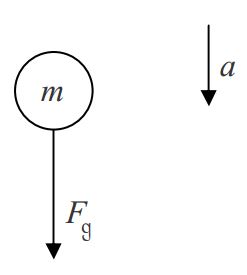
Here is the free body diagram and the corresponding table of forces for Example \(\ref{15-1}\):
| Table of Forces | |||
| Symbol=? | Name | Agent | Victim |
| \[F_g=mg\nonumber \] | Gravitational Force | The Earth's Gravitational Field | The Rock |
Note:
1) The only thing touching the object while it is up in the air (neglecting the air itself) is the earth’s gravitational field. So there is only one force on the object, namely the gravitational force. The arrow representing the force vector is drawn so that the tail of the arrow is touching the object, and the arrow extends away from the object in the direction of the force.
2) Unless otherwise stipulated and labeled on the diagram, upward is toward the top of the page and downward is toward the bottom of the page.
3) The arrow representing the acceleration must be near but not touching the object. (If it is touching the object, one might mistake it for a force.)
4) There is no velocity information on a free body diagram.
5) There is no force of the hand acting on the object because, at the instant in question, the hand is no longer touching the object. When you draw a free body diagram, only forces that are acting on the object at the instant depicted in the diagram are included. The acceleration of the object depends only on the currently-acting forces on the object. The force of the hand is of historical interest only.
6) Regarding the table of forces:
a) Make sure that for any free body diagram you draw, you are capable of making a complete table of forces. You are not required to provide a table of forces with every free body diagram you draw, but you should expect to be called upon to create a table of forces more than once.
b) In the table of forces, the agent is the life form or thing that is exerting the force and the victim is the object on which the force is being exerted. Make sure that, in every case, the victim is the object for which the free body diagram is being drawn.
c) In the case at hand, there is only one force so there is only one entry in the table of forces.
d) For any object near the surface of the earth, the agent of the gravitational force is the earth’s gravitational field. It is okay to abbreviate that to “Earth” because the gravitational field of the earth can be considered to be an invisible part of the earth, but it is NOT okay to call it “gravity.” Gravity is a subject heading corresponding to the kind of force the gravitational force is, gravity is not an agent.
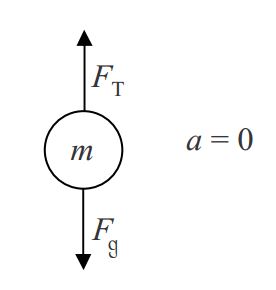
A ball of mass m hangs at rest, suspended by a string. Draw the free body diagram for the ball, and create the corresponding table of forces.
Solution
To do this problem, you need the following information about strings:
(This also applies to ropes, cables, chains, and the like.)
The force exerted by a string, on an object to which it is attached, is always directed away from the object, along the length of the string.
Note that the force in question is exerted by the string, not for instance, by some person pulling on the other end of the string.
The force exerted by a string on an object is referred to as a “tension force” and its magnitude is conventionally represented by the symbol \(F_T\).
Note: There is no formula to tell you what the tension force is. If it is not given, the only way to get it is to use Newton’s 2nd Law.
Here is the free body diagram of the ball, and the corresponding table of forces for Example 15-2:
| Symbol=? | Name | Agent | Victim |
|---|---|---|---|
| \[F_T\nonumber \] | Tension Force | The String | The Ball |
| \[F_g=mg\nonumber \] | Gravitational Force | The Earth's Gravitational Field | The Ball |
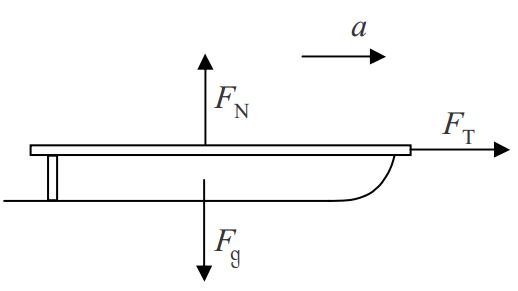
A sled of mass \(m\) is being pulled forward over a horizontal frictionless surface by means of a horizontal rope attached to the front of the sled. Draw the free body diagram of the sled and provide the corresponding table of forces.
Solution
Aside from the rope and the earth’s gravitational field, the sled is in contact with a solid surface. The surface exerts a kind of force that we need to know about in order to create the free body diagram for this example.
When an object is in contact with a surface, that surface exerts a force on the object. The surface presses on the object. The force on the object is away from the surface, and it is perpendicular to the surface. The force is called the normal force because “normal” means perpendicular, and as mentioned, the force is perpendicular to the surface. We use the symbol \(F_N\) to represent the magnitude of the normal force.
Note: There is no formula to tell you what the normal force is. If it is not given, the only way to get it is to use Newton’s 2nd Law.
Here is the free body diagram of the sled as well as the corresponding table of forces.
| Name | Agent | Victim | |
|---|---|---|---|
| \[F_N\nonumber \] | Normal Force | The Horizontal Surface | The Sled |
| \[F_T\nonumber \] | Tension Force | The Rope | The Sled |
| \[F_g=mg\nonumber \] | Gravitational Force | The Earth's Gravitational Field | The Sled |
Note: The word “Free” in “Free Body Diagram” refers to the fact that the object is drawn free of its surroundings. Do not include the surroundings (such as the horizontal surface on which the sled is sliding in the case at hand) in your Free Body Diagram.
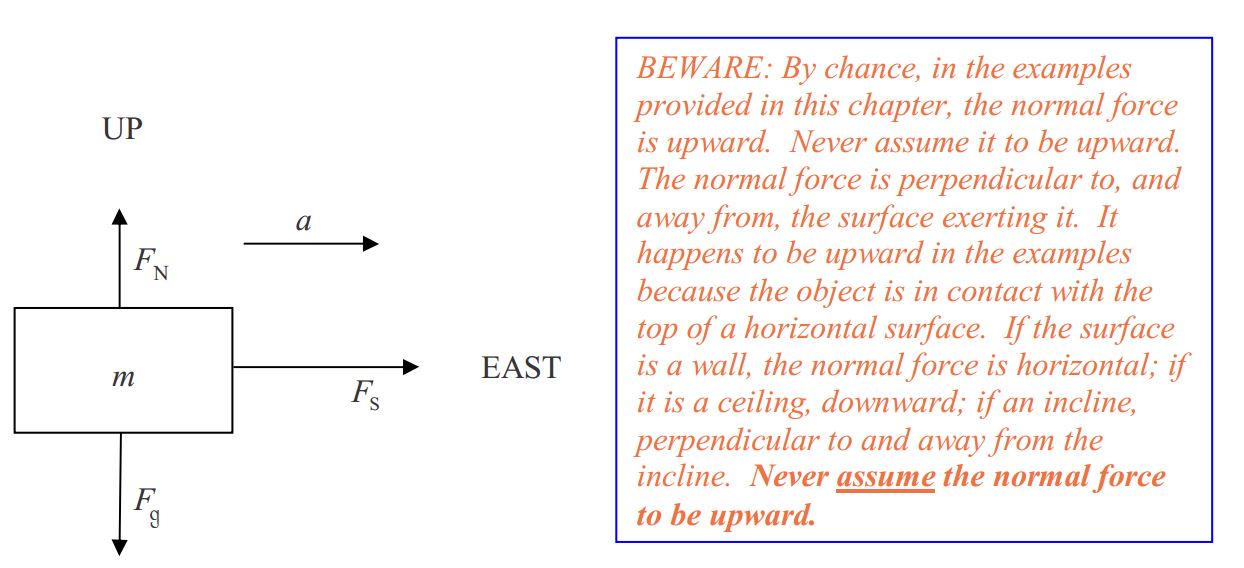
A block of mass \(m\) rests on a frictionless horizontal surface. The block is due west of a west-facing wall. The block is attached to the wall by an ideal massless uncompressed/unstretched spring whose force constant is \(k\). The spring is perpendicular to the wall. A person pulls the block a distance x directly away from the wall and releases it from rest. Draw the free body diagram of the block appropriate for the first instant after release. Provide the corresponding table of forces.
Solution
Now, for the first time, we have a spring exerting a force on the object for which we are drawing the free body diagram. So, we need to know about the force exerted by a spring.
The force exerted by an ideal massless spring on an object in contact with one end of the spring is directed along the length of the spring, and
\(\bullet\) away from the object if the spring is stretched,
\(\bullet\) toward the object if the spring is compressed.
For the spring to exert a force on the object in the stretched-spring case, the object must be attached to the end of the spring. Not so in the compressed-spring case. The spring can push on an object whether or not the spring is attached to the object.
The force depends on the amount \(|x|\) by which the spring is stretched or compressed, and on a measure of the stiffness of the spring known as the force constant of the spring a.k.a. the spring constant and represented by the symbol \(k\). The magnitude of the spring force is typically represented by the symbol \(F_s\). The spring force is directly proportional to the amount of stretch \(|x|\). The spring constant \(k\) is the constant of proportionality. Thus,
\[F_s=k|x|\label{15-2} \]
Here is the free body diagram of the block, and the corresponding table of forces for Example 15-4:
| Name | Agent | Victim | |
|---|---|---|---|
| \[F_N\nonumber \] | Normal Force | The Horizontal Surface | The Block |
| \[F_s=k|x|\nonumber \] | Spring Force | The Spring | The Block |
| \[F_g=mg\nonumber \] | Gravitational Force | The Earth's Gravitational Field | The Block |
From your vantage point, a crate of mass \(m\) is sliding rightward on a flat level concrete floor. Nothing solid is in contact with the crate except for the floor. Draw the free body diagram of the crate. Provide the corresponding table of forces.
Solution
From our experience with objects sliding on concrete floors, we know that the crate is slowing down at the instant under consideration. It is slowing because of kinetic friction.
A surface, upon which an object is sliding, exerts (in addition to the normal force) a retarding force on that object. The retarding force is in the direction opposite that of the velocity of the object. In the case of an object sliding on a dry surface of a solid body (such as a floor) we call the retarding force a kinetic frictional force. Kinetic means motion and we include the adjective kinetic to make it clear that we are dealing with an object that is in motion.
The kinetic frictional formula given below is an empirical result. This means that it is derived directly from experimental results. It works only in the case of objects sliding on dry surfaces. It does not apply, for instance, to the case of an object sliding on a greased surface.
We use the symbol \(F_{kf}\) for the kinetic friction force. The kinetic frictional formula reads
\[F_{kf}=\mu_K F_N\label{15-3} \]
\(F_N\) is the magnitude of the normal force. Its presence in the formula indicates that the more strongly the surface is pressing on the object, the greater the frictional force.
\(\mu_K\) (mu-sub-K) is called the coefficient of kinetic friction. Its value depends on the materials of which both the object and the surface are made as well as the smoothness of the two contact surfaces. It has no units. It is just a number. The magnitude of the kinetic frictional force is some fraction of the magnitude of the normal force; \(\mu_K\) is that fraction. Values of \(\mu_K\) for various pairs of materials can be found in handbooks. They tend to fall between \(0\) and \(1\). The actual value for a given pair of materials depends on the smoothness of the surface and is typically quoted with but a single significant digit.
IMPORTANT: \(\mu_K\) is a coefficient (with no units) used in calculating the frictional force. It is not a force itself.
Here is the free body diagram and the table of forces for the case at hand. The crate is moving rightward and slowing down—it has a leftward acceleration.
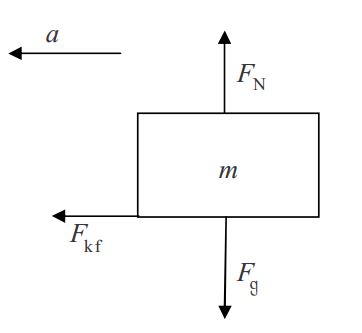
| Symbol=? | Name | Agent | Victim |
|---|---|---|---|
| \[F_N\nonumber \] | Normal Force | The Concrete Floor | The Crate |
| \[F_{kf}=\mu_{K}F_{N}\nonumber \] | Kinetic Friction Force | The Concrete Floor | The Crate |
| \[F_g=mg\nonumber \] | Gravitational Force | The Earth's Gravitational Field | The Crate |
A person has pushed a brick along a tile floor toward an eastward-facing wall trapping a spring of unstretched length \(L_0\) and force constant \(k\) between the wall and the end of the brick that is facing the wall. That end of the brick is a distance d from the wall. The person has released the brick, but the spring is unable to budge it— the brick remains exactly where it was when the person released it. Draw the free body diagram for the brick and provide the corresponding table of forces.
Solution
A frictional force is acting on an object at rest. Typically, an object at rest clings more strongly to the surface with which it is in contact than the same object does when it is sliding across the same surface. What we have here is a case of static friction.
A surface that is not frictionless can exert a static friction force on an object that is in contact with that surface. The force of static friction is parallel to the surface. It is in the direction opposite the direction of impending motion of the stationary object. The direction of impending motion is the direction in which the object would accelerate if there was no static friction.
In general, there is no formula for calculating static friction—to solve for the force of static friction, you use Newton’s 2nd Law. The force of static friction is whatever it has to be to make the net parallel-to-the-surface force zero.
We use the symbol \(F_{sf}\) to represent the magnitude of the static friction force.
SPECIAL CASE: Imagine trying to push a refrigerator across the floor. Imagine that you push horizontally, and that you gradually increase the force with which you are pushing. Initially, the harder you push, the bigger the force of static friction. But it can’t grow forever. There is a maximum possible static friction force magnitude for any such case. Once the magnitude of your force exceeds that, the refrigerator will start sliding. The maximum possible force of static friction is given by:
\[F_{sf}^{max}=\mu_s F_N\label{15-4} \]
The unitless quantity \(\mu_s\) is the coefficient of static friction specific to the type of surface the object is sliding on and the nature of the surface of the object. Values of \(\mu_s\) tend to fall between \(0\) and \(1\). For a particular pair of surfaces, \(\mu_s\) is at least as large as, and typically larger than, \(\mu_K\).
Clearly, this formula \((F_{sf}^{\mbox{max possible}}=\mu_s F_N)\) is only applicable when the question is about the maximum possible force of static friction. You can use this formula if the object is said to be on the verge of slipping, or if the question is about how hard one must push to budge an object. It also comes in handy when you want to know whether or not an object will stay put. In such a case you would use Newton’s 2nd to find out the magnitude of the force of static friction needed to keep the object from accelerating. Then you would compare that magnitude with the maximum possible magnitude of the force of static friction.
Here is the free body diagram of the brick and the table of forces for Example 15-6:
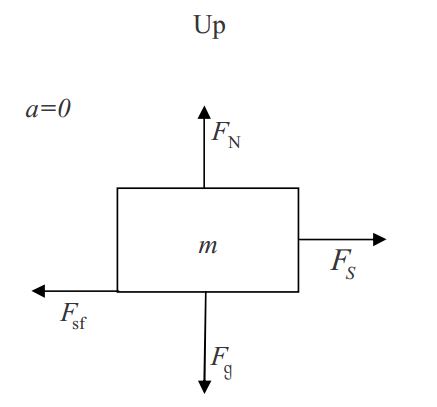
| Symbol=? | Name | Agent | Victim |
|---|---|---|---|
| \[F_N \nonumber \] | Normal Force | The Tile Floor | The Brick |
| \[F_{sf} \nonumber \] | Static Friction Force | The Tile Floor | The Brick |
| \[F_g=mg \nonumber \] | Gravitational Force | The Earth's Gravitational Field | The Brick |
| \[F_s=k|x| \nonumber \] | Spring Force | The Spring | The Brick |