10.2: Introduction


- Last updated
- Sep 24, 2020
- Save as PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
Usually, there are several forces acting on an object at the same time. However, the object will only change its motion if one of the forces is greater than the other(s). An object will be accelerated by a net force. A net force is the sum of all forces (both magnitude and direction) acting on an object. If all forces are balancing each other, then the object will not change its motion. Forces that are balanced are equal in magnitude, but are applied in opposite directions. A net force (F) on a mass (m) will cause an acceleration (a).
F=ma
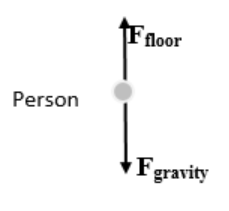
Example: A person standing on the floor would experience two forces.