
Rolling Motion


- Last updated
- Jun 17, 2019
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
- Describe the physics of rolling motion without slipping
- Explain how linear variables are related to angular variables for the case of rolling motion without slipping
- Find the linear and angular accelerations in rolling motion with and without slipping
- Calculate the static friction force associated with rolling motion without slipping
- Use energy conservation to analyze rolling motion
Rolling motion is that common combination of rotational and translational motion that we see everywhere, every day. Think about the different situations of wheels moving on a car along a highway, or wheels on a plane landing on a runway, or wheels on a robotic explorer on another planet. Understanding the forces and torques involved in rolling motion is a crucial factor in many different types of situations.
For analyzing rolling motion in this chapter, refer to Figure 10.5.4 in Fixed-Axis Rotation to find moments of inertia of some common geometrical objects. You may also find it useful in other calculations involving rotation.
Rolling Motion without Slipping
People have observed rolling motion without slipping ever since the invention of the wheel. For example, we can look at the interaction of a car’s tires and the surface of the road. If the driver depresses the accelerator to the floor, such that the tires spin without the car moving forward, there must be kinetic friction between the wheels and the surface of the road. If the driver depresses the accelerator slowly, causing the car to move forward, then the tires roll without slipping. It is surprising to most people that, in fact, the bottom of the wheel is at rest with respect to the ground, indicating there must be static friction between the tires and the road surface. In Figure
To analyze rolling without slipping, we first derive the linear variables of velocity and acceleration of the center of mass of the wheel in terms of the angular variables that describe the wheel’s motion. The situation is shown in Figure
From Figure
Since the velocity of P relative to the surface is zero, vP = 0, this says that
Thus, the velocity of the wheel’s center of mass is its radius times the angular velocity about its axis. We show the correspondence of the linear variable on the left side of the equation with the angular variable on the right side of the equation. This is done below for the linear acceleration.
If we differentiate Equation
Furthermore, we can find the distance the wheel travels in terms of angular variables by referring to Figure
We see from Figure
A solid cylinder rolls down an inclined plane without slipping, starting from rest. It has mass m and radius r. (a) What is its acceleration? (b) What condition must the coefficient of static friction
Strategy
Draw a sketch and free-body diagram, and choose a coordinate system. We put x in the direction down the plane and y upward perpendicular to the plane. Identify the forces involved. These are the normal force, the force of gravity, and the force due to friction. Write down Newton’s laws in the x- and y-directions, and Newton’s law for rotation, and then solve for the acceleration and force due to friction.
Solution
- The free-body diagram and sketch are shown in Figure
Substituting in from the free-body diagram
we can then solve for the linear acceleration of the center of mass from these equations:
However, it is useful to express the linear acceleration in terms of the moment of inertia. For this, we write down Newton’s second law for rotation,
The torques are calculated about the axis through the center of mass of the cylinder. The only nonzero torque is provided by the friction force. We have
Finally, the linear acceleration is related to the angular acceleration by
These equations can be used to solve for aCM,
From this we obtain
Note that this result is independent of the coefficient of static friction,
Since we have a solid cylinder, from Figure 10.5.4, we have ICM =
Therefore, we have
- Because slipping does not occur, fS ≤
Significance
- The linear acceleration is linearly proportional to sin
- For no slipping to occur, the coefficient of static friction must be greater than or equal to
A hollow cylinder is on an incline at an angle of 60°. The coefficient of static friction on the surface is
It is worthwhile to repeat the equation derived in this example for the acceleration of an object rolling without slipping:
This is a very useful equation for solving problems involving rolling without slipping. Note that the acceleration is less than that for an object sliding down a frictionless plane with no rotation. The acceleration will also be different for two rotating cylinders with different rotational inertias.
Rolling Motion with Slipping
In the case of rolling motion with slipping, we must use the coefficient of kinetic friction, which gives rise to the kinetic friction force since static friction is not present. The situation is shown in Figure
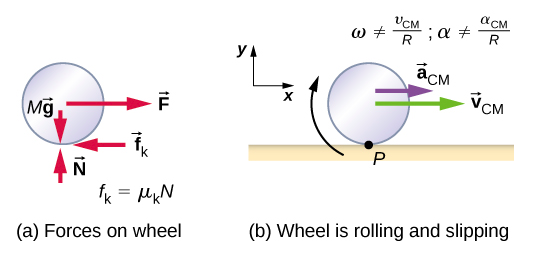
A solid cylinder rolls down an inclined plane from rest and undergoes slipping (Figure
Strategy
Draw a sketch and free-body diagram showing the forces involved. The free-body diagram is similar to the no-slipping case except for the friction force, which is kinetic instead of static. Use Newton’s second law to solve for the acceleration in the x-direction. Use Newton’s second law of rotation to solve for the angular acceleration.
Solution
The sum of the forces in the y-direction is zero, so the friction force is now fk =
or
The friction force provides the only torque about the axis through the center of mass, so Newton’s second law of rotation becomes
Solving for
Significance
We write the linear and angular accelerations in terms of the coefficient of kinetic friction. The linear acceleration is the same as that found for an object sliding down an inclined plane with kinetic friction. The angular acceleration about the axis of rotation is linearly proportional to the normal force, which depends on the cosine of the angle of inclination. As
Conservation of Mechanical Energy in Rolling Motion
In the preceding chapter, we introduced rotational kinetic energy. Any rolling object carries rotational kinetic energy, as well as translational kinetic energy and potential energy if the system requires. Including the gravitational potential energy, the total mechanical energy of an object rolling is
In the absence of any nonconservative forces that would take energy out of the system in the form of heat, the total energy of a rolling object without slipping is conserved and is constant throughout the motion. Examples where energy is not conserved are a rolling object that is slipping, production of heat as a result of kinetic friction, and a rolling object encountering air resistance.
You may ask why a rolling object that is not slipping conserves energy, since the static friction force is nonconservative. The answer can be found by referring back to Figure
The Curiosity rover, shown in Figure
Strategy
We use mechanical energy conservation to analyze the problem. At the top of the hill, the wheel is at rest and has only potential energy. At the bottom of the basin, the wheel has rotational and translational kinetic energy, which must be equal to the initial potential energy by energy conservation. Since the wheel is rolling without slipping, we use the relation vCM = r
Solution
Energy at the top of the basin equals energy at the bottom:
The known quantities are ICM = mr2, r = 0.25 m, and h = 25.0 m.
We rewrite the energy conservation equation eliminating
or
On Mars, the acceleration of gravity is 3.71 m/s2, which gives the magnitude of the velocity at the bottom of the basin as
Significance
This is a fairly accurate result considering that Mars has very little atmosphere, and the loss of energy due to air resistance would be minimal. The result also assumes that the terrain is smooth, such that the wheel wouldn’t encounter rocks and bumps along the way.
Also, in this example, the kinetic energy, or energy of motion, is equally shared between linear and rotational motion. If we look at the moments of inertia in Figure 10.5.4, we see that the hollow cylinder has the largest moment of inertia for a given radius and mass. If the wheels of the rover were solid and approximated by solid cylinders, for example, there would be more kinetic energy in linear motion than in rotational motion. This would give the wheel a larger linear velocity than the hollow cylinder approximation. Thus, the solid cylinder would reach the bottom of the basin faster than the hollow cylinder.