
4.1: Introduction

( \newcommand{\kernel}{\mathrm{null}\,}\)
Newton and His Laws
There are three laws of motion that describe the relationship between forces, mass, and acceleration.
learning objectives
- Apply three Newton’s laws of motion to relate forces, mass, and acceleration
Newton’s laws of motion describe the relationship between the forces acting on a body and its motion due to those forces. For example, if your car breaks down and you need to push it, you must exert a force with your hands on the car in order for it to move. The laws of motion will tell you how quickly the car will move from your pushing. There are three laws of motion:
First law: If an object experiences no net force, then its velocity is constant: the object is either at rest (if its velocity is zero), or it moves in a straight line with constant speed (if its velocity is nonzero). For example, if you don’t push the car (no force), then it doesn’t move.
Second law: The acceleration aa of a body is parallel and directly proportional to the net force F acting on the body, is in the direction of the net force, and is inversely proportional to the mass mm of the body:
F=m⋅a or a=Fm
For example, if you push the car with a greater force it will accelerate more. But, if the car is more massive (mm is larger) then it won’t accelerate as much from the same size force as a lighter car.
Third law: When a first body exerts a force F1 on a second body, the second body simultaneously exerts a force F2=−F1 on the first body. This means that F1 and F2 are equal in magnitude and opposite in direction. For example, when you push a car, if it is exerting the same force on you that you are exerting on it, you might wonder why you don’t move backwards? The answer is there are also forces from the ground on your feet pushing you forward. So, in fact, the car is pushing a force back on you that is of the same magnitude that you are using to push it forward.
In the figure below there are some practical examples illustrating the concept of force:
- Strain: by using a machine known as pulley you can easily raise or lower a massive body
- Gravitational Force: a massive body is attracted downward by the gravitational force practiced by the Earth
- Magnetic Force: two magnets repel each other when the same poles get closer
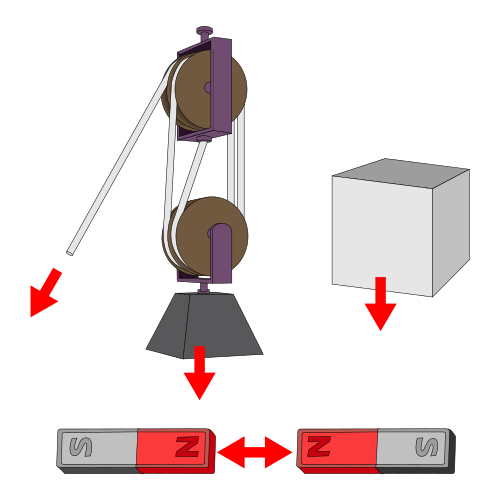
Examples of Force: Some situations in which forces are at play.
Key Points
- Acceleration of an object is proportional to the force on it.
- Force causes an object to move.
- Objects with more mass require more force to move.
Key Terms
- force: Any influence that causes an object to undergo a certain change, either concerning its movement, direction or geometrical construction.
LICENSES AND ATTRIBUTIONS
CC LICENSED CONTENT, SHARED PREVIOUSLY
- Curation and Revision. Provided by: Boundless.com. License: CC BY-SA: Attribution-ShareAlike
CC LICENSED CONTENT, SPECIFIC ATTRIBUTION
- Newton's laws of motion. Provided by: Wikipedia. Located at: en.Wikipedia.org/wiki/Newton's_laws_of_motion. License: CC BY-SA: Attribution-ShareAlike
- force. Provided by: Wiktionary. Located at: en.wiktionary.org/wiki/force. License: CC BY-SA: Attribution-ShareAlike
- File:Force examples.svg - Wikipedia, the free encyclopedia. Provided by: Wikipedia. Located at: en.Wikipedia.org/w/index.php?title=File:Force_examples.svg&page=1. License: CC BY-SA: Attribution-ShareAlike