
5.2: Rotation Angle and Angular Velocity


- Last updated
- Jul 16, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Learning Objectives
By the end of this section, you will be able to:
- Define arc length, rotation angle, radius of curvature and angular velocity.
- Calculate the angular velocity of a car wheel spin.
In Kinematics, we studied motion along a straight line and introduced such concepts as displacement, velocity, and acceleration. Two-Dimensional Kinematics dealt with motion in two dimensions. Projectile motion is a special case of two-dimensional kinematics in which the object is projected into the air, while being subject to the gravitational force, and lands a distance away. In this chapter, we consider situations where the object does not land but moves in a curve. We begin the study of uniform circular motion by defining two angular quantities needed to describe rotational motion.
Rotation Angle
When objects rotate about some axis—for example, when the CD (compact disc) in Figure rotates about its center—each point in the object follows a circular arc. Consider a line from the center of the CD to its edge. Each pit used to record sound along this line moves through the same angle in the same amount of time. The rotation angle is the amount of rotation and is analogous to linear distance. We define the rotation angle Δθ to be the ratio of the arc length to the radius of curvature:
Δθ=Δsr.

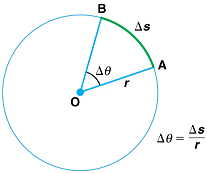
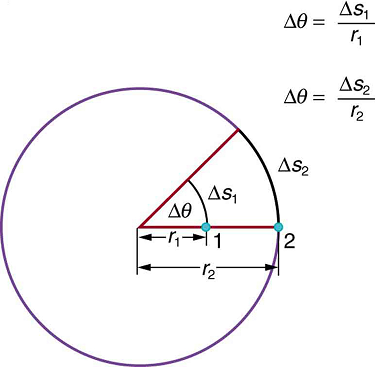
The arc length Δs is the distance traveled along a circular path as shown in Figure. Note that is the radius of curvature of the circular path.We know that for one complete revolution, the arc length is the circumference of a circle of radius r. The circumference of a circle is 2πr.
Thus for one complete revolution the rotation angle is Δθ=2πrr=2π.
This result is the basis for defining the units used to measure rotation angles, Δθ to be radians (rad), defined so that
2πradians=1 revolution.
A comparison of some useful angles expressed in both degrees and radians is shown in Table 5.2.1.
| Degree Measure | Radian Measure |
|---|---|
| 30o | π6 |
| 60o | π3 |
| 90o | π2 |
| 120o | 2π3 |
| 135o | 3π4 |
| 180o | π |
If Δθ=2πrad, then the CD has made one complete revolution, and every point on the CD is back at its original position. Because there are 360o in a circle or one revolution, the relationship between radians and degrees is thus
2πrad=360o
so that
1rad=360o2π≈57.3o
Angular Velocity
How fast is an object rotating? We define angular velocity ω as the rate of change of an angle. In symbols, this is
ω=ΔθΔt,
where an angular rotation Δθ takes place in a time Δt. The greater the rotation angle in a given amount of time, the greater the angular velocity. The units for angular velocity are radians per second (rad/s).Angular velocity ω is analogous to linear velocity v. To get the precise relationship between angular and linear velocity, we again consider a pit on the rotating CD. This pit moves an arc length Δs in a time Δt, and so it has a linear velocity
v=ΔsΔt.
From Δθ=Δsr we see that Δs=rΔθ. Substituting this into the expression for v gives
v=rΔθΔt=rω.
We write this relationship in two different ways and gain two different insights:
v=rω,orω=vr.
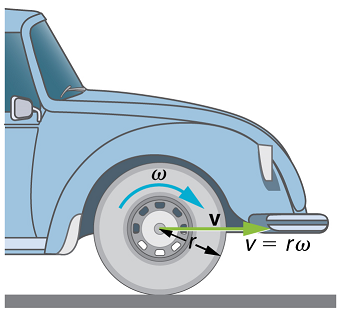
The first relationship in v=rω,orω=vr states that the linear velocity v is proportional to the distance from the center of rotation, thus, it is largest for a point on the rim (largest r), as you might expect. We can also call this linear speed v of a point on the rim the tangential speed. The second relationship in v=rω,orω=vr can be illustrated by considering the tire of a moving car. Note that the speed of a point on the rim of the tire is the same as the speed v of the car. See Figure So the faster the car moves, the faster the tire spins—large v means a large ω, because v=rω. Similarly, a larger-radius tire rotating at the same angular velocity (ω) will produce a greater linear speed (v) for the car.
Example 5.2.1: How Fast Does the Car Tire Spin?
Calculate the angular velocity of a 0.300 m radius car tire when the car travels at 15.0m/s (about 54km/h). See Figure.
Strategy
Because the linear speed of the tire rim is the same as the speed of the car, we have v=15.0m/s. The radius of the tire is given to be r=0.300m. Knowing v and r, we can use the second relationship in v=ωr, ω=vr to calculate the angular velocity.
Solution
To calculate the angular velocity, we will use the following relationship:
ω=vr.
Substituting the knowns,
ω=15.0m/s0.300m=50.0rad/s.
Discussion
When we cancel units in the above calculation, we get 50.0/s. But the angular velocity must have units of rad/s. Because radians are actually unitless (radians are defined as a ratio of distance), we can simply insert them into the answer for the angular velocity. Also note that if an earth mover with much larger tires, say 1.20 m in radius, were moving at the same speed of 15.0 m/s, its tires would rotate more slowly. They would have an angular velocity
ω=(15.0m/s)/(1.20m)=12.5rad/s.
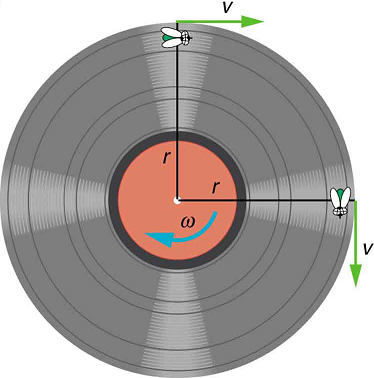
Both ω and v have directions (hence they are angular and linear velocities, respectively). Angular velocity has only two directions with respect to the axis of rotation—it is either clockwise or counterclockwise. Linear velocity is tangent to the path, as illustrated in Figure.
TAKE-HOME EXPERIMENT
Tie an object to the end of a string and swing it around in a horizontal circle above your head (swing at your wrist). Maintain uniform speed as the object swings and measure the angular velocity of the motion. What is the approximate speed of the object? Identify a point close to your hand and take appropriate measurements to calculate the linear speed at this point. Identify other circular motions and measure their angular velocities.
PHET EXPLORATIONS: LADYBUG REVOLUTION
Join the ladybug in an exploration of rotational motion. Rotate the merry-go-round to change its angle, or choose a constant angular velocity or angular acceleration. Explore how circular motion relates to the bug's x,y position, velocity, and acceleration using vectors or graphs.
Section Summary
- Uniform circular motion is motion in a circle at constant speed. The rotation angle δθ is defined as the ratio of the arc length to the radius of curvature:
Δθ=Δsr
where arc length δs is distance traveled along a circular path and r is the radius of curvature of the circular path. The quantity Δθ is measured in units of radians (rad), for which
2πrad=360o=1revolution.
- The conversion between radians and degrees is 1rad=57.3o.
- Angular velocity ω is the rate of change of an angle,
ω=ΔθΔt,
where a rotation Δθ takes place in a time Δt. The units of angular velocity are radians per second (rad/s). Linear velocity v and angular velocity ω are related by
v=rω,orω=vr.
Glossary
- arc length
- Δs, the distance traveled by an object along a circular path
- pit
- a tiny indentation on the spiral track moulded into the top of the polycarbonate layer of CD
- rotation angle
- the ratio of the arc length to the radius of curvature on a circular path: \(Δθ=\frac{Δs}{r}\)
- radius of curvature
- radius of a circular path
- radians
- a unit of angle measurement
- angular velocity
- ω, the rate of change of the angle with which an object moves on a circular path