
4.3: Momenta of Systems
- Page ID
- 18402

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Momentum Conservation
Our reason for studying center of mass was to make sense out of its role in momentum conservation. We are now able to unpack the "\(\Delta \overrightarrow p_{cm} \)" from Equation 4.1.3. We know that the delta means "after minus before," so let's focus on the rest of it:
\[ \overrightarrow p_{cm} = M \overrightarrow v_{cm} = M \dfrac{d}{dt} \overrightarrow r_{cm} = \cancel{M} \dfrac{d}{dt} \left[ \dfrac{m_1 \overrightarrow r_1 +m_2 \overrightarrow r_2 + \dots}{\cancel{M}} \right] = m_1 \dfrac{d}{dt} \overrightarrow r_1 + m_2 \dfrac{d}{dt} \overrightarrow r_2 + \dots = m_1 \overrightarrow v_1 + m_2 \overrightarrow v_2 + \dots = \overrightarrow p_1 + \overrightarrow p_2 + \dots \]
So we see a very important result:
The momentum of a system, defined as the total mass of the system multiplied by the velocity of the center of mass of that system, equals the (vector) sum of the momenta of the individual objects contained in the system.
Alert
Reiterating the previous alert... The velocity of the center of mass of a system is the velocity of a mathematical construct, not of a particular piece of matter. The objects within the system move as they do, and the center of mass's motion is derived from all these motions. Indeed, it is possible for the center of mass to remain stationary even though every object in the system is moving, if their momenta happen to cancel out to zero.
If we now put the delta back in, and assume that the external impulses sum to zero, we get the following expression of the momentum conservation of the system:
\[ 0 = \Delta \overrightarrow p_{cm} = \Delta \overrightarrow p_1 + \Delta \overrightarrow p_2 + \dots \]
When we are talking about multiple objects, it is probably more intuitive to take an equivalent "before = after" viewpoint. This consists of breaking up all of the \(\Delta \overrightarrow p \)'s into \(\overrightarrow p_{after}-\overrightarrow p_{before}\), and collecting all of the "befores" on one side of the equation, and the "afters" on the other. This looks like:
\[ \underbrace{\overrightarrow p_1+\overrightarrow p_2+\dots}_{before} = \underbrace{\overrightarrow p_1+\overrightarrow p_2+\dots}_{after} \]
The sum on each side is over the several objects in the system. So adding up the momentum vectors of all the objects before some event, and then doing it again after the event gives the same vector. This of course assumes that the "event" does not involve an external impulse, though it can include as many internal impulses as you like.
Alert
It is important to remember that this equation does not mean that each of the terms remains unchanged. Rather, they change in such a way that the changes all compensate for each other, and the sum of the all-new momentum vectors comes out to the same sum that came out before.
Example \(\PageIndex{2}\)
A 30.0kg child sits on the rear end of a 12.0kg, 3.50m long sled (whose mass is uniformly-distributed along its length) with a 18.0kg block of frozen snow at rest in her lap. The sled is sliding forward on the horizontal, frictionless snow at constant a speed of 1.60m/s, when the girl suddenly shoves the block forward in the sled (she remains firmly planted on the sled). After a time of 2.50s, the block comes to rest in the front of the sled.
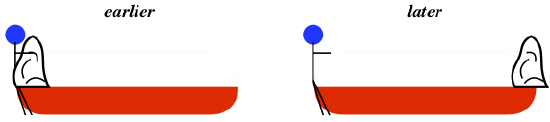
- Find the speed of the sled after the block stops sliding forward.
- Find the position of the center of mass of the girl + sled + block before the block is pushed. Reference this position from the rear of the sled.
- Find the distance (relative to the ground) that the center of mass of the girl + sled + block moves during the period of time that the block slides forward.
- Find the distance that the sled moves during the period of time that the block slides forward.
- Solution
-
a. One can do all the “in-between” math to get this answer, but the simplest method is to note that all the forces between the child, snow, and sled are internal to the system, and the system experiences no net external force, which means that the motion of its center of mass remains unaffected. The center of mass of the system was moving at 1.60m/s before the child shoved, and it will be moving at the same speed as the snow moves forward, and the same speed after the snow stops. The sled will slow be moving slower than its initial speed as the snow is sliding forward, because the sled is not moving with the center of mass of the system, but when the snow reaches the front, the whole system is once again moving together.
b. To find the center of mass of the system, we treat each object in the system as if it is a point mass existing at its own center of mass, and plug into the center of mass equation. Choosing the rear of the sled as the origin (our reference point), the girl and snow are at the origin, while the center of mass of the sled is half its length from the origin, giving:
\[ x_{cm} = \dfrac{m_{girl}x_{girl} + m_{snow}x_{snow} + m_{sled}x_{sled}}{m_{girl} + m_{snow} + m_{sled}} =\boxed{0.350m} \nonumber \]
c. The speed of the system remains unchanged during this time (as indicated in part a), so the distance that the center of mass moves during this period is just the speed times the time:
\[ \Delta x_{cm} = v_{cm} t = \boxed{4.00m} \nonumber \]
d. However far the sled travels, the girl travels the same distance, and the snow travels that distance plus the length of the sled. Plugging in all these changes into the equation for the change of center of mass (of the whole system) gives:
\[ \Delta x_{cm} = \dfrac{m_{girl}\Delta x_{girl} + m_{snow}\Delta x_{snow} + m_{sled}\Delta x_{sled}}{m_{girl} + m_{snow} + m_{sled}} = \dfrac{m_{girl}\Delta x_{sled} + m_{snow}\left( \Delta x_{sled}+L \right) + m_{sled}\Delta x_{sled}}{M} \nonumber \]
Solving for the displacement of the sled gives:
\[ \Delta x_{sled} = \Delta x_{cm} - \dfrac{m_{snow}L}{M} = \boxed{2.95m} \nonumber \]
Using Center of Mass
Let's look at an example of how we can use what we know about center of mass the analyze a case of two blocks of different masses that squeeze a (massless) spring between them until they are released from rest.
Figure 4.3.1 – Repelling Masses
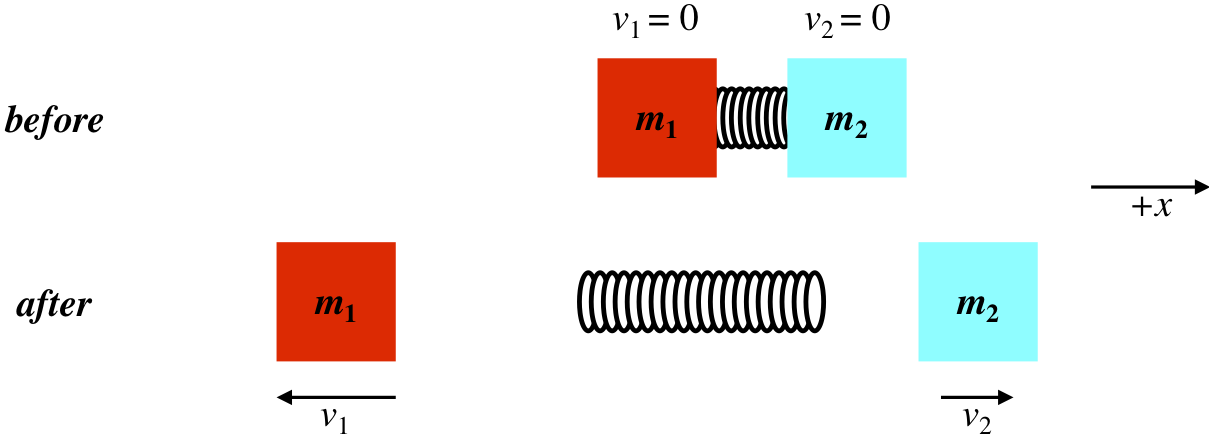
Intuitively one can probably tell that for this situation \(m_2>m_1\). When a light object pushes off a heavy one (a flea jumping off a dog, a bullet leaving a gun, etc.), the lighter object's motion is always affected more. With our physics training, we can explain it with Newton's second and third laws: The blocks push on each other with equal forces (third law), and with equal forces, the block with less mass will accelerate more. They both start from rest and are pushed for equal periods of time, so the one with the greater acceleration will be going faster when they separate, sending it a greater distance in the same time period.
Okay, now let's look at it from the perspective of momentum conservation. Treating the two blocks as a single system, the spring force produces only internal impulses, which means that the momentum of the system is conserved. The momentum before the spring unloads is zero, so it must be zero afterward. If \(v_1\) and \(v_2\) are the speeds of the two blocks (i.e. these are positive numbers), then we have for our conservation equation:
\[ momentum \; before = momentum \; after \;\;\; \Rightarrow \;\;\; 0 = m_1 v_1 \left(- \widehat i \right) + m_2 v_2 \left(+ \widehat i \right) \;\;\; \Rightarrow \;\;\; v_1 = \dfrac{m_2}{m_1} v_2 \]
Since it's clear from the diagram that \(v_1>v_2\), it must be that \(m_2>m_1\). We can also use what we know about center of mass here. The system experiences no external net impulse and its center of mass is stationary, so it must remain stationary! We don't know exactly where the center of mass is before the repulsion, but since it stays put, we can draw a vertical line down into the second diagram to find where it is after the repulsion. This clearly results in the center of mass being closer to \(m_2\), which means that is the larger mass.
Center of Mass Acceleration
Let's see if we can incorporate what we have learned about center of mass to make sense of Newton's second law. Consider the two systems shown in Figure 4.3.2. Each consists of a collection of 8 identical particles in close proximity to each other (the boxes shown are just used as a reference for later motion – they are not physical objects). In the left system, the particles are floating freely (there is no gravity or other forces), while in the right diagram, the particles are bound together with rigid, massless rods. The two systems are identical in every way except for the presence of these rods – the particle all have the same positions and masses as their counterparts, and are all at rest.
Now for the experiment: Suppose we exert the same force on the same particle in both systems. Clearly the reaction is different in the two cases – in the left case, only the particle given the push accelerates away, while in the right cases the entire group of particles accelerates. The question is, in which case does the center of mass of the system of particles accelerate more?
Figure 4.3.2 – Forces on Free and Rigid Systems
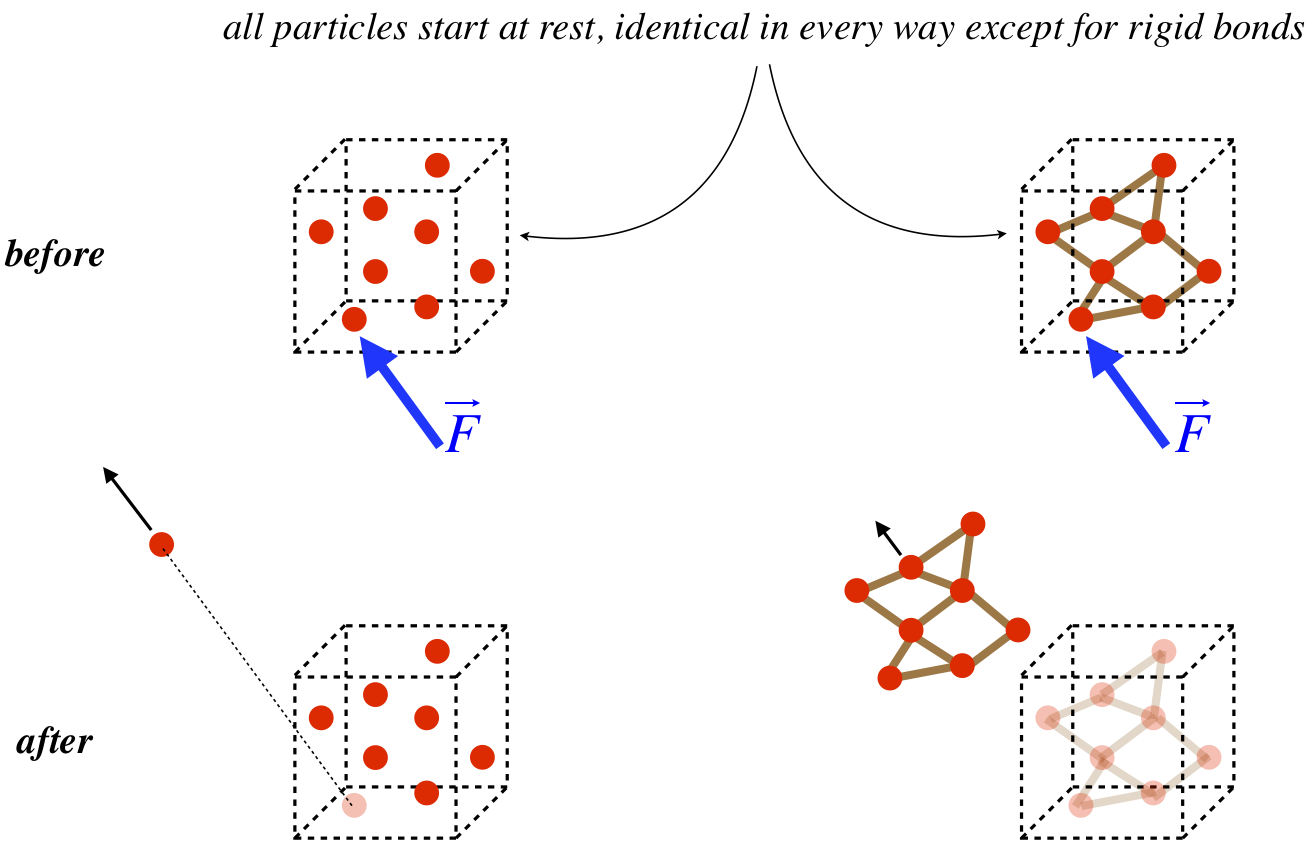
Here is the short answer: The forces that are (or are not) between the particles defining the system are internal, and therefore have no effect on the velocity of the system's center of mass. The only external force on each system is \(\overrightarrow F\), and each system has the same mass, so Newton's second law says that both systems should react with the same acceleration of their center of mass.
But that is unconvincing when we see only one particle move in one case, and the whole conglomerate move in the other! Let's suppose the forces act for some small period of time. The acceleration of the single particle will be eight times greater than that of the conglomerate, so in the same time interval it will move eight times as far as the conglomerate. Let's call the initial position of the center of mass the origin. The seven particles left behind experience no change in their position relative to this origin, and the one particle's position relative to the origin travels eight units of distance, while all eight of the particle in the other system travel just one unit from their original positions relative to the origin. Treating the direction of motion as the \(+x\) direction, and plugging the masses and distances into Equation 4.2.1, it should be immediately clear that both centers of mass move by the same amount. As strange as it sounds, Newton's second law works for any system of particles, whether they bond together to form a solid object, or are completely independent of each other, like particles in a gas.
Center of Mass Frame
Sometimes analysis of problems that involve multiple objects interacting with each other is simplified by using what is called the center of mass frame of reference. Here’s an example.
A child's toy called a "hot potato" consists of two hemispherical shells that close on a spring and are held together by a latch on a timer. When the time expires, the latch is released and the spring is allowed to expand, shooting the two shells in opposite directions, exposing the toy company to a product liability lawsuit from the family of the child that holds the hot potato when it goes off.
Let's suppose a child throws this hot potato through the air, and the peak of its projectile motion, it explodes so that the two shells are propelled horizontally, as shown in Figure 4.3.3. The landing point of the shell that lands closest to where the toy was thrown is noted, but the other shell flies off into some tall grass and is lost. Naturally the child knows the starting speed they gave the toy as well as the exit angle, and she can easily measure the distance that the closer shell travels form the launch point. From this information and her vast knowledge of physics, she conceives of a plan to find the other shell that is far more elegant than searching for it in the tall grass.
Figure 4.3.3 – Exploding Projectile
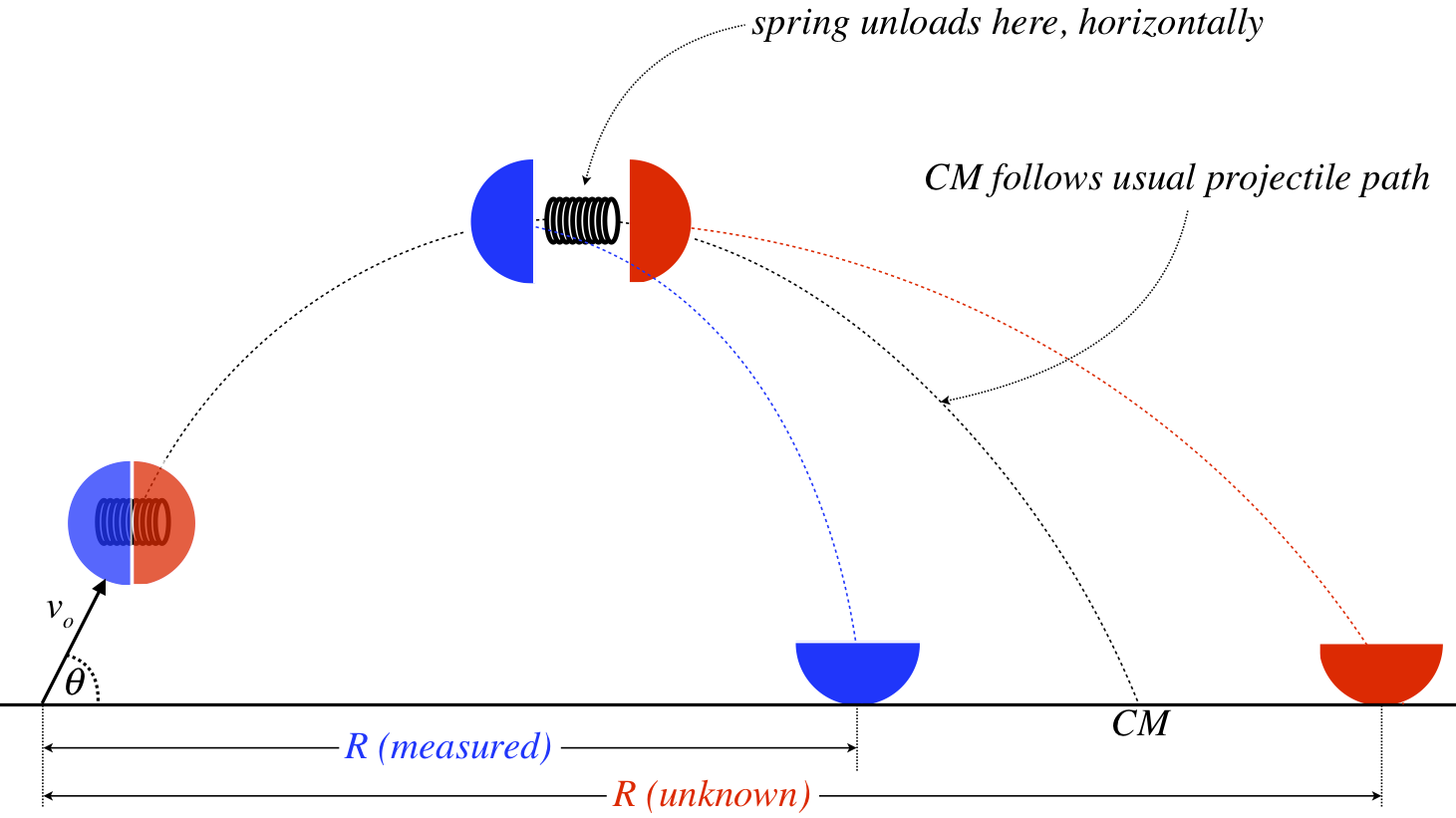
The forces on the shells by the spring are internal to the two-shell system, so assuming air resistance is negligible, the center of mass of the system will behave exactly as it would if the internal forces didn't exist. With the starting angle and speed known, the child can use the range equation (see Example 1.7.4) to calculate the landing point of the center of mass of the system. Then with the actual landing point of one piece of the toy, she can use the center of mass formula to compute the landing point of the other piece.
You might think we can do the same even if the spring unloads in an orientation that is other than horizontal, but this is not the case. The center of mass motion still follows the same parabolic trajectory, but naturally the center of mass is always between the two shells. In the case above, the shells land simultaneously (they both start with zero vertical component of velocity when the explosion occurs), so the center of mass lands at the same time, between the shells. When the explosion is not horizontal, one shell lands before the other, then friction stops is horizontal motion while the other shell keeps moving horizontally. This makes calculating the landing point of the center of mass using the usual range equation impossible.
Example \(\PageIndex{3}\)
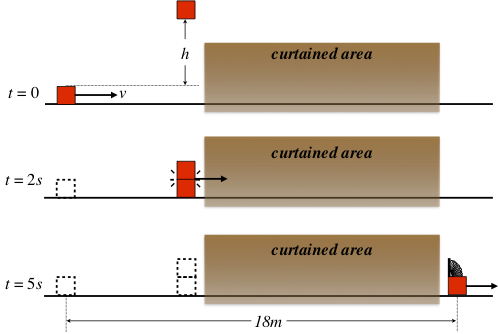
A 1.4kg block slides along a frictionless horizontal surface at a speed of v = 4.8m/s, starting at position x = 0 and time t = 0. At time t = 2.0s, an identical block lands directly on top of it. The surfaces of the blocks that are sticky, so the top block adheres to the bottom block when it lands on it, and they continue along together. The blocks slide together into a curtained-off area, after which you hear a spring noise and a “thud.” At time t = 5.0s, the bottom block emerges from the curtain at position x = 18.0m without the top block on it, after apparently having its top lid sprung open from within. Find the x position of the other block at this time (which is presumed to be on the frictionless surface, still within the curtained area).
- Solution
-
For the collision of the two blocks, the vertical momentum is not conserved (gravity and the normal force from the floor don't cancel during the collision, so there is a net vertical impulse), but the horizontal momentum is conserved. This because the horizontal frictional (or "adhesive force," if you prefer) is internal to the two-block system. The blocks have equal mass, so setting in incoming horizontal momentum of a single block equal to the outgoing horizontal momentum of both blocks gives:
\[ mv_o + 0 = 2mv_f \;\;\; \Rightarrow \;\;\; v_f = \frac{1}{2} v_o = 2.4 \dfrac{m}{s} \nonumber \]
The horizontal momentum of the two-block system remains constant for the entire time, which means that this system’s center of mass continues at a constant horizontal velocity. This center of mass velocity is clearly the “final” velocity computed above, since at \(t = 2.0s\) the two blocks are moving together. All we need therefore is the starting \(x\)-position of the system's center of mass and the time elapsed, and we can determine the new position of the center of mass. The starting position of the two-block system's center of mass is the \(x\)-position halfway between the blocks (since they have equal masses), and we can set the starting position of the sliding block to be the origin, but what is the \(x\)-position of the falling block?
We are given that the time that the sliding block takes to reach the falling block, and we have its speed, so we know how far it the two blocks are separated in the \(x\)-direction, and with it, the starting position of the center of mass:
\[ x_{cm} \left(t=0s\right) = \frac{1}{2} v_o t = 4.80m \nonumber \]
With the speed of the center of mass of the two-block system, the starting position of the center of mass, and the time elapsed, we know where the center of mass is later:
\[ x_{cm} \left(t\right) = x_{cm} \left(t=0s\right) + v_{cm} t = 16.8m \nonumber \]
The blocks have equal mass, so this center of mass positon lies halfway between the two blocks, and since we know the position of the sliding block, we can get the position of the falling block:
\[ x_{cm} = \frac{1}{2} \left(x_{sliding} + x_{falling}\right) \;\;\; \Rightarrow \;\;\; x_{falling} = \boxed{15.6m} \nonumber \]
Rocketry
While we are on the topic of two parts of a system going their separate ways by pushed off each other, this brings us to the topic of rocketry. A rocket that is stationary in space somehow is able to accelerate itself by firing its engines. How can the center of mass of the rocket system accelerate without any external forces acting on it? Well, it can't of course, but the rocket (or rather, its fuselage) is not an isolated system. It expels fuel (in the form of very hot gas) backward. If we include the fuel as part of the system, then the center of mass of the system doesn't accelerate at all! All that matters in the end is that the fuselage of the rocket is propelled forward. Note also that the rocket has more mass than the fuel, but the ignited fuel sends particles away at very high speeds, and this momentum balances the momentum of the fuselage in the opposite direction (which has more mass and lower velocity).