
Module 4 - Summary




( \newcommand{\kernel}{\mathrm{null}\,}\)
Summary Notes Module 4
• Any amplitude distribution can be expressed as a sum of plane waves, i.e., exp[j2π(ux+vy)]. Compared to the mathematical expression of a plane wave in Module 2, exp[j(kxx+kyy)], then kx=2πu=2πλsinθx and ky=2πv=2πλsinθy. This means that the angle of the plane waves along the x- and y-direction can be estimated by θx=sin−1(λu)andθy=sin−1(λv).
• An imaging system must be a linear shift-invariant system. Consider that an imaging system is represented by a S operator.

A system is linear if the output is equal to the sum of the individual outputs.

A system is shift-invariant if the output of a displaced input signal is the same function but displaced by the same amount.

Only when the optical system is linear space-invariant (LSI), the output signal, g(x,y), can be expressed as the two-dimensional (2D) convolution (⊗2) between the input signal, f(x,y), and the impulse response of the system, h(x,y): g(x,y)=f(x,y)⊗2h(x,y).
In the Fourier domain, the spectrum of the output signal, G(u,v), is the product between the spectrum of the input signal, F(u,v), and the optical transfer function, H(u,v): G(u,v)=F(u,v)H(u,v).
• Free-space propagator under the Fresnel approximation
h(x,y)=ejkzjλzexp[jk2z(x2+y2)],
Condition of the Fresnel region: NFθ2m4≪1,
• Free-space propagator under the Fraunhofer approximation (z≫)
g(x,y)=f(x,y)⊗2h(x,y)=F(xλz,yλz)=F(xM,yM),
For z≫, the amplitude distribution (also known as the diffraction pattern) of an object transmittance f(x,y) is a scaled version of its Fourier Transform under Fraunhofer approximation.
Condition of the Fraunhofer region: z≫b2inputλandz≫a2outputλ,
• Converging and diverging (i.e., optical) lenses make Fourier transforms.

Consider a converging lens. If an object with amplitude transmittance t(x,y) is placed at the front focal plane of a lens (i.e., the distance between the object/input and lens planes is equal to the lens’ focal length, f), a scaled replica of the Fourier transform of the object transmittance is found at its back focal plane: T(xλf,yλf).
• Calculation of the complex amplitude distribution of an arbitrary optical system with an input transmittance t(x,y). The arbitrary optical system is represented by its ABCD matrix.
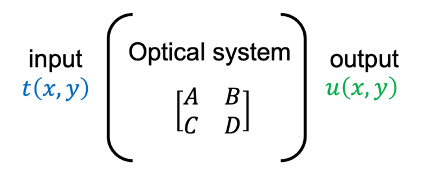
If B=0, the complex amplitude distribution at the output plane is the product of a quadratic phase wavefront and a scaled replica of the object transmittance: u(x,y)=ejkL0/Aexp[jkC2A(x2+y2)]t(xA,yA),
Else, if B≠0, the complex amplitude distribution at the output plane becomes: u(x,y)=ejkL0jλBexp[jkD2B(x2+y2)]∫∞−∞t(x0,y0)exp[jkA2B(x20+y20)]exp[−j2πλB(xx0+yy0)]dx0dy0.
• 4f imaging system if both lenses have the same focal length

• 4f imaging system if both lenses have different focal lengths

• Spatial filtering in a 4f imaging system by inserting a pupil with transmittance p(x,y) at the Fourier plane of a 4f system. The pupil filters out some object frequencies.

Thus, the complex amplitude at the image plane (i.e., back focal plane of the L2 lens) is: u(x,y)=1M2t(xM,yM)⊗2P(xλf2,yλf2)=1M2t(xM,yM)⊗2h(x,y),