
3.5: Addition of Velocities
- Page ID
- 1495

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Learning Objectives
By the end of this section, you will be able to:
- Apply principles of vector addition to determine relative velocity.
- Explain the significance of the observer in the measurement of velocity.
Relative Velocity
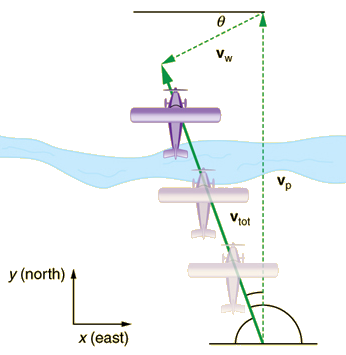
If a person rows a boat across a rapidly flowing river and tries to head directly for the other shore, the boat instead moves diagonallyrelative to the shore, as in Figure \(\displaystyle \PageIndex{1}\). The boat does not move in the direction in which it is pointed. The reason, of course, is that the river carries the boat downstream. Similarly, if a small airplane flies overhead in a strong crosswind, you can sometimes see that the plane is not moving in the direction in which it is pointed, as illustrated in Figure \(\displaystyle \PageIndex{2}\). The plane is moving straight ahead relative to the air, but the movement of the air mass relative to the ground carries it sideways.
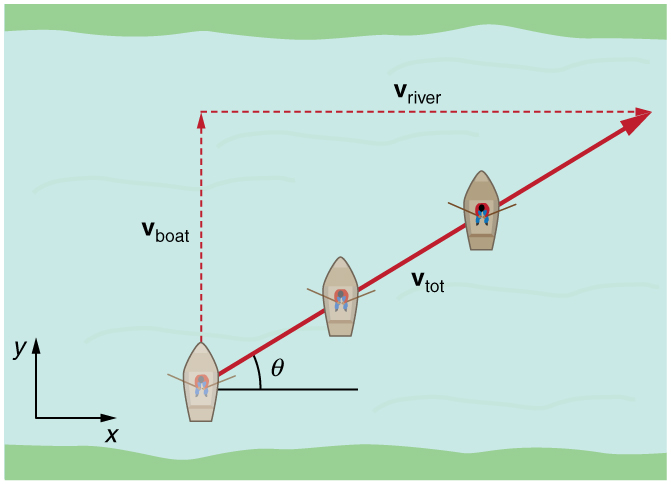
In each of these situations, an object has a velocity relative to a medium (such as a river) and that medium has a velocity relative to an observer on solid ground. The velocity of the object relative to the observer is the sum of these velocity vectors, as indicated in Figures \(\displaystyle \PageIndex{1}\) and \(\displaystyle \PageIndex{2}\). These situations are only two of many in which it is useful to add velocities. In this module, we first re-examine how to add velocities and then consider certain aspects of what relative velocity means.
How do we add velocities? Velocity is a vector (it has both magnitude and direction); the rules of vector addition discussed inVector Addition and Subtraction: Graphical Methods and Vector Addition and Subtraction: Analytical Methods apply to the addition of velocities, just as they do for any other vectors. In one-dimensional motion, the addition of velocities is simple—they add like ordinary numbers. For example, if a field hockey player is moving at 5 m/s straight toward the goal and drives the ball in the same direction with a velocity of 30 m/s relative to her body, then the velocity of the ball is 35 m/s relative to the stationary, profusely sweating goalkeeper standing in front of the goal.
In two-dimensional motion, either graphical or analytical techniques can be used to add velocities. We will concentrate on analytical techniques. The following equations give the relationships between the magnitude and direction of velocity (\(\displaystyle v\) and \(\displaystyle θ\) ) and its components (\(\displaystyle v_x\) and \(\displaystyle v_y\) ) along the x- and y-axes of an appropriately chosen coordinate system:
\[v_x=v\cos θ\]
\[v_y=v\sin θ\]
\[ v=\sqrt{v^2x+v^2} \]
\[ θ=\tan^{−1}\left(\dfrac{v_y}{v_x}\right).\]
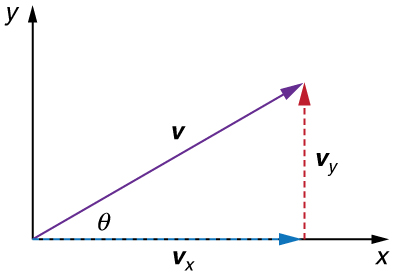
These equations are valid for any vectors and are adapted specifically for velocity. The first two equations are used to find the components of a velocity when its magnitude and direction are known. The last two are used to find the magnitude and direction of velocity when its components are known.
TAKE-HOME EXPERIMENT: RELATIVE VELOCITY OF A BOAT
Fill a bathtub half-full of water. Take a toy boat or some other object that floats in water. Unplug the drain so water starts to drain. Try pushing the boat from one side of the tub to the other and perpendicular to the flow of water. Which way do you need to push the boat so that it ends up immediately opposite? Compare the directions of the flow of water, heading of the boat, and actual velocity of the boat.
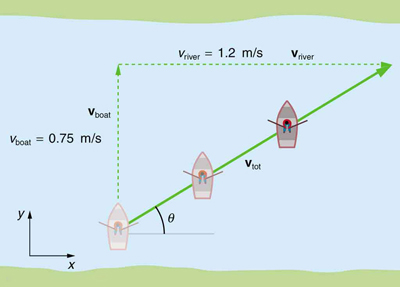
Example \(\displaystyle \PageIndex{1}\): Adding Velocities - A Boat on a River
Refer to Figure \(\displaystyle \PageIndex{4}\), which shows a boat trying to go straight across the river. Let us calculate the magnitude and direction of the boat’s velocity relative to an observer on the shore, \(\displaystyle v_{tot}\). The velocity of the boat, vboat , is 0.75 m/s in the y -direction relative to the river and the velocity of the river, \(\displaystyle v_{river}\), is 1.20 m/s to the right.
Strategy
We start by choosing a coordinate system with its \(\displaystyle x\)-axis parallel to the velocity of the river, as shown in Figure. Because the boat is directed straight toward the other shore, its velocity relative to the water is parallel to the y-axis and perpendicular to the velocity of the river. Thus, we can add the two velocities by using the equations \(\displaystyle v_{tot}=\sqrt{v^2_x+v^2_y}\) and \(\displaystyle θ=tan^{−1}(v_y/v_x)\) directly.
Solution
The magnitude of the total velocity is
\(\displaystyle v_{tot}=\sqrt{v^2_x+v^2_y}\),
where
\(\displaystyle v_x=v_{river}=1.20 m/s\)
and
\(\displaystyle v_y=v_{boat}=0.750 m/s.\)
Thus,
\(\displaystyle v_{tot}=\sqrt{(1.20 m/s)^2+(0.750 m/s)^2}\)
yielding
\(\displaystyle v_{tot}=1.42 m/s.\)
The direction of the total velocity \(\displaystyle θ\) is given by:
\(\displaystyle θ=tan^{−1}(v_y/v_x)=tan^{−1}(0.750/1.20).\)
This equation gives
\(\displaystyle θ=32.0º.\)
Discussion
Both the magnitude v and the direction \(\displaystyle θ\) of the total velocity are consistent with Figure. Note that because the velocity of the river is large compared with the velocity of the boat, it is swept rapidly downstream. This result is evidenced by the small angle (only 32.0º) the total velocity has relative to the riverbank.
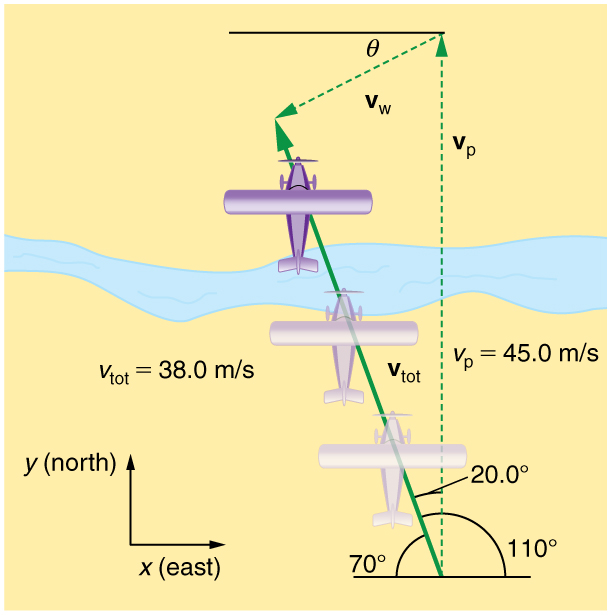
Example \(\displaystyle \PageIndex{2}\): Calculating Velocity - Wind Velocity Causes an Airplane to Drift
Calculate the wind velocity for the situation shown in Figure \(\displaystyle \PageIndex{5}\). The plane is known to be moving at 45.0 m/s due north relative to the air mass, while its velocity relative to the ground (its total velocity) is 38.0 m/s in a direction 20.0º west of north.
Strategy
In this problem, somewhat different from the previous example, we know the total velocity \(\displaystyle v_{to}\)t and that it is the sum of two other velocities, \(\displaystyle v_w\) (the wind) and \(\displaystyle v_p\) (the plane relative to the air mass). The quantity \(\displaystyle v_p\) is known, and we are asked to find vw. None of the velocities are perpendicular, but it is possible to find their components along a common set of perpendicular axes. If we can find the components of \(\displaystyle v_w\), then we can combine them to solve for its magnitude and direction. As shown in Figure, we choose a coordinate system with its x-axis due east and its y-axis due north (parallel to \(\displaystyle v_p\)). (You may wish to look back at the discussion of the addition of vectors using perpendicular components in Vector Addition and Subtraction: Analytical Methods.)
Solution
Because \(\displaystyle v_{tot}\) is the vector sum of the \(\displaystyle v_w\) and \(\displaystyle v_p\), its x- and y-components are the sums of the x- and y-components of the wind and plane velocities. Note that the plane only has vertical component of velocity so \(\displaystyle v_{px}=0\) and \(\displaystyle v_{py}=v_p\). That is,
\(\displaystyle v_{tot}x=v_{wx}\)
and
\(\displaystyle v_{toty}=v_{wy}+v_p\).
We can use the first of these two equations to find \(\displaystyle v_{wx}\):
\(\displaystyle v_{wx}=v_{totx}=v_{tot}cos 110º.\)
Because \(\displaystyle v_{tot}=38.0 m/s\) and \(\displaystyle cos 110º=–0.342\) we have
\(\displaystyle v_{wx}=(38.0 m/s)(–0.342)=–13 m/s.\)
The minus sign indicates motion west which is consistent with the diagram.
Now, to find \(\displaystyle v_{wy}\) we note that
\(\displaystyle v_{toty}=v_{wy}+v_p\)
Here \(\displaystyle v_{toty}=v_{tot}sin 110º\); thus,
\(\displaystyle v_{wy}=(38.0 m/s)(0.940)−45.0 m/s=−9.29 m/s.\)
This minus sign indicates motion south which is consistent with the diagram.
Now that the perpendicular components of the wind velocity \(\displaystyle v_{wx}\) and \(\displaystyle v_{wy}\) are known, we can find the magnitude and direction of \(\displaystyle v_w\). First, the magnitude is
\(\displaystyle v_w=\sqrt{v^2_{wx}+v^2_{wy}}=\sqrt{(−13.0 m/s)^2+(−9.29 m/s)^2}\)
so that
\(\displaystyle v_w=16.0 m/s.\)
The direction is:
\(\displaystyle θ=tan^{−1}(v_{wy}/v_{wx})=tan^{−1}(−9.29/−13.0)\)
giving
\(\displaystyle θ=35.6º.\)
Discussion
The wind’s speed and direction are consistent with the significant effect the wind has on the total velocity of the plane, as seen in Figure. Because the plane is fighting a strong combination of crosswind and head-wind, it ends up with a total velocity significantly less than its velocity relative to the air mass as well as heading in a different direction.
Note that in both of the last two examples, we were able to make the mathematics easier by choosing a coordinate system with one axis parallel to one of the velocities. We will repeatedly find that choosing an appropriate coordinate system makes problem solving easier. For example, in projectile motion we always use a coordinate system with one axis parallel to gravity.
Relative Velocities and Classical Relativity
When adding velocities, we have been careful to specify that the velocity is relative to some reference frame. These velocities are called relative velocities. For example, the velocity of an airplane relative to an air mass is different from its velocity relative to the ground. Both are quite different from the velocity of an airplane relative to its passengers (which should be close to zero). Relative velocities are one aspect of relativity, which is defined to be the study of how different observers moving relative to each other measure the same phenomenon.
Nearly everyone has heard of relativity and immediately associates it with Albert Einstein (1879–1955), the greatest physicist of the 20th century. Einstein revolutionized our view of nature with his modern theory of relativity, which we shall study in later chapters. The relative velocities in this section are actually aspects of classical relativity, first discussed correctly by Galileo and Isaac Newton.Classical relativity is limited to situations where speeds are less than about 1% of the speed of light—that is, less than . Most things we encounter in daily life move slower than this speed.
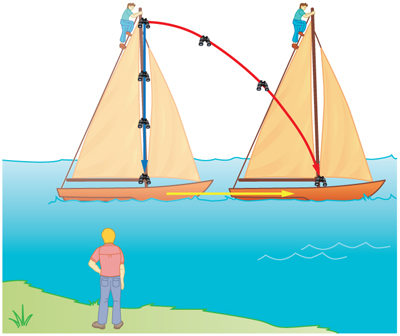
Let us consider an example of what two different observers see in a situation analyzed long ago by Galileo. Suppose a sailor at the top of a mast on a moving ship drops his binoculars. Where will it hit the deck? Will it hit at the base of the mast, or will it hit behind the mast because the ship is moving forward? The answer is that if air resistance is negligible, the binoculars will hit at the base of the mast at a point directly below its point of release. Now let us consider what two different observers see when the binoculars drop. One observer is on the ship and the other on shore. The binoculars have no horizontal velocity relative to the observer on the ship, and so he sees them fall straight down the mast. (Figure \(\displaystyle \PageIndex{1}\); blue curve) To the observer on shore, the binoculars and the ship have the same horizontal velocity, so both move the same distance forward while the binoculars are falling. This observer sees the red curved path shown in Figure \(\displaystyle \PageIndex{6}\). Although the paths look different to the different observers, each sees the same result—the binoculars hit at the base of the mast and not behind it. To get the correct description, it is crucial to correctly specify the velocities relative to the observer.
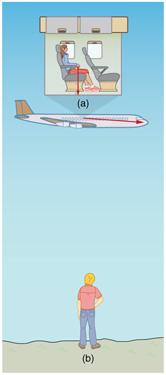
Example \(\displaystyle \PageIndex{3}\): Calculating Relative Velocity: An Airline Passenger Drops a Coin
An airline passenger drops a coin while the plane is moving at 260 m/s. What is the velocity of the coin when it strikes the floor 1.50 m below its point of release: (a) Measured relative to the plane? (b) Measured relative to the Earth?
Strategy
Both problems can be solved with the techniques for falling objects and projectiles. In part (a), the initial velocity of the coin is zero relative to the plane, so the motion is that of a falling object (one-dimensional). In part (b), the initial velocity is 260 m/s horizontal relative to the Earth and gravity is vertical, so this motion is a projectile motion. In both parts, it is best to use a coordinate system with vertical and horizontal axes.
Solution for (a)
Using the given information, we note that the initial velocity and position are zero, and the final position is 1.50 m. The final velocity can be found using the equation:
\(\displaystyle v_y^2=v_{0y}^2−2g(y−y_0).\)
Substituting known values into the equation, we get
\(\displaystyle v_y^2=0^2−2(9.80m/s^2)(−1.50m−0 m)=29.4m^2/s^2\)
yielding
\(\displaystyle v_y=−5.42 m/s.\)
We know that the square root of 29.4 has two roots: 5.42 and -5.42. We choose the negative root because we know that the velocity is directed downwards, and we have defined the positive direction to be upwards. There is no initial horizontal velocity relative to the plane and no horizontal acceleration, and so the motion is straight down relative to the plane.
Solution for (b)
Because the initial vertical velocity is zero relative to the ground and vertical motion is independent of horizontal motion, the final vertical velocity for the coin relative to the ground is \(\displaystyle v_y=−5.42m/s\), the same as found in part (a). In contrast to part (a), there now is a horizontal component of the velocity. However, since there is no horizontal acceleration, the initial and final horizontal velocities are the same and \(\displaystyle v_x=260 m/s\). The x- and y-components of velocity can be combined to find the magnitude of the final velocity:
\(\displaystyle v=\sqrt{v_x^2+v_y^2}\).
Thus,
\(\displaystyle v=\sqrt{(260 m/s)^2+(−5.42 m/s)^2}\)
yielding
\(\displaystyle v=260.06 m/s.\)
The direction is given by:
\(\displaystyle θ=tan^{−1}(v_y/v_x)=tan^{−1}(−5.42/260)\)
so that
\(\displaystyle θ=tan^{−1}(−0.0208)=−1.19º.\)
Discussion
In part (a), the final velocity relative to the plane is the same as it would be if the coin were dropped from rest on the Earth and fell 1.50 m. This result fits our experience; objects in a plane fall the same way when the plane is flying horizontally as when it is at rest on the ground. This result is also true in moving cars. In part (b), an observer on the ground sees a much different motion for the coin. The plane is moving so fast horizontally to begin with that its final velocity is barely greater than the initial velocity. Once again, we see that in two dimensions, vectors do not add like ordinary numbers—the final velocity v in part (b) is not \(\displaystyle (260 – 5.42) m/s\); rather, it is \(\displaystyle 260.06 m/s.\) The velocity’s magnitude had to be calculated to five digits to see any difference from that of the airplane. The motions as seen by different observers (one in the plane and one on the ground) in this example are analogous to those discussed for the binoculars dropped from the mast of a moving ship, except that the velocity of the plane is much larger, so that the two observers see very different paths. (See Figure.) In addition, both observers see the coin fall 1.50 m vertically, but the one on the ground also sees it move forward 144 m (this calculation is left for the reader). Thus, one observer sees a vertical path, the other a nearly horizontal path.
MAKING CONNECTIONS: RELATIVITY AND EINSTEIN
Because Einstein was able to clearly define how measurements are made (some involve light) and because the speed of light is the same for all observers, the outcomes are spectacularly unexpected. Time varies with observer, energy is stored as increased mass, and more surprises await.
PHET EXPLORATIONS: MOTION IN 2D
Try the new "Ladybug Motion 2D" simulation for the latest updated version. Learn about position, velocity, and acceleration vectors. Move the ball with the mouse or let the simulation move the ball in four types of motion (2 types of linear, simple harmonic, circle).
Summary
- Velocities in two dimensions are added using the same analytical vector techniques, which are rewritten as
\(\displaystyle v_x=vcosθ\)
\(\displaystyle v_y=vsinθ\)
\(\displaystyle v=\sqrt{v^2_x+v^2+y}\)
\(\displaystyle θ=tan^{−1}(v_y/v_x)\).
- Relative velocity is the velocity of an object as observed from a particular reference frame, and it varies dramatically with reference frame.
- Relativity is the study of how different observers measure the same phenomenon, particularly when the observers move relative to one another. Classical relativity is limited to situations where speed is less than about 1% of the speed of light (3000 km/s).
Glossary
- classical relativity
- the study of relative velocities in situations where speeds are less than about 1% of the speed of light—that is, less than 3000 km/s
- relative velocity
- the velocity of an object as observed from a particular reference frame
- relativity
- the study of how different observers moving relative to each other measure the same phenomenon
- velocity
- speed in a given direction
- vector addition
- the rules that apply to adding vectors together