
16.4: Conservation of Energy for Fixed Axis Rotation





( \newcommand{\kernel}{\mathrm{null}\,}\)
Consider a closed system (ΔEsystem=0) under action of only conservative internal forces. Then the change in the mechanical energy of the system is zero
ΔEm=ΔU+ΔK=(Uf+Kf)−(Ui+Ki)=0
For fixed axis rotation with a component of angular velocity ω about the fixed axis, the change in kinetic energy is given by
ΔK≡Kf−Ki=12ISω2f−12ISω2i
where S is a point that lies on the fixed axis. Then conservation of energy implies that
Uf+12ISω2f=Ui+12ISω2i
Example 16.4 Energy and Pulley System
A wheel in the shape of a uniform disk of radius R and mass mp is mounted on a frictionless horizontal axis. The wheel has moment of inertia about the center of mass Icm=(1/2)mpR2 A massless cord is wrapped around the wheel and one end of the cord is attached to an object of mass m2 that can slide up or down a frictionless inclined plane. The other end of the cord is attached to a second object of mass m1 that hangs over the edge of the inclined plane. The plane is inclined from the horizontal by an angle θ (Figure 16.12). Once the objects are released from rest, the cord moves without slipping around the disk. Calculate the speed of block 2 as a function of distance that it moves down the inclined plane using energy techniques. Assume there are no energy losses due to friction and that the rope does not slip around the pulley
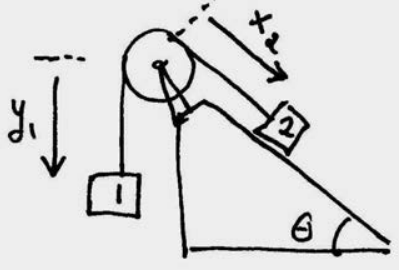
Solution: Define a coordinate system as shown in Figure 16.13. Choose the zero for the gravitational potential energy at a height equal to the center of the pulley. In Figure 16.14 illustrates the energy diagrams for the initial state and a dynamic state at an arbitrary time when the blocks are sliding.

Then the initial mechanical energy is
Ei=Ui=−m1gy1,i−m2gx2,isinθ
The mechanical energy, when block 2 has moved a distance
d=x2−x2,i
is given by
E=U+K=−m1gy1−m2gx2sinθ+12m1v21+12m2v22+12Ipω2
The rope connects the two blocks, and so the blocks move at the same speed
v≡v1=v2
The rope does not slip on the pulley; therefore as the rope moves around the pulley the tangential speed of the rope is equal to the speed of the blocks
vtan=Rω=v
Equation (16.3.6) can now be simplified
E=U+K=−m1gy1−m2gx2sinθ+12(m1+m2+IPR2)v2
Because we have assumed that there is no loss of mechanical energy, we can set Ei=E and find that
−m1gy1,i−m2gx2,isinθ=−m1gy1−m2gx2sinθ+12(m1+m2+IPR2)v2
which simplifies to
−m1g(y1,0−y1)+m2g(x2−x2,0)sinθ=12(m1+m2+IPR2)v2
We finally note that the movement of block 1 and block 2 are constrained by the relationship
d=x2−x2,i=y1,i−y1
Then Equation (16.3.11) becomes
gd(−m1+m2sinθ)=12(m1+m2+IPR2)v2
We can now solve for the speed as a function of distance d=x2−x2,i that block 2 has traveled down the incline plane
v=√2gd(−m1+m2sinθ)(m1+m2+(IP/R2))
If we assume that the moment of inertial of the pulley is Icm=(1/2)mpR2, then the speed becomes
v=√2gd(−m1+m2sinθ)(m1+m2+(1/2)mP)
Example 16.5 Physical Pendulum
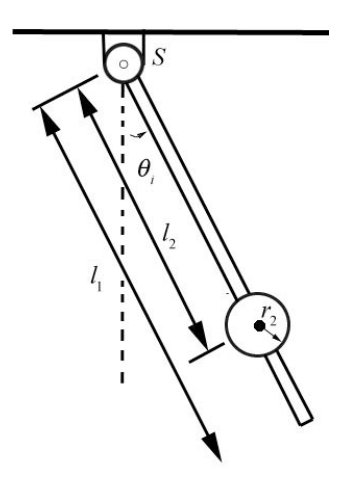
A physical pendulum consists of a uniform rod of mass m1 pivoted at one end about the point S. The rod has length l1 and moment of inertia I1 about the pivot point. A disc of mass m2 and radius r2 with moment of inertia Icm about its center of mass is rigidly attached a distance l2 from the pivot point. The pendulum is initially displaced to an angle θi and then released from rest. (a) What is the moment of inertia of the physical pendulum about the pivot point S ? (b) How far from the pivot point is the center of mass of the system? (c) What is the angular speed of the pendulum when the pendulum is at the bottom of its swing?
Solution: a) The moment of inertia about the pivot point is the sum of the moment of inertia of the rod, given as I1, and the moment of inertia of the disc about the pivot point. The moment of inertia of the disc about the pivot point is found from the parallel axis theorem,
Idisc =Icm+m2l22
The moment of inertia of the system consisting of the rod and disc about the pivot point S is then
IS=I1+Idisc=I1+Icm+m2l22
The center of mass of the system is located a distance from the pivot point
lcm=m1(l1/2)+m2l2m1+m2
b) We can use conservation of mechanical energy, to find the angular speed of the pendulum at the bottom of its swing. Take the zero point of gravitational potential energy to be the point where the bottom of the rod is at its lowest point, that is, θ=0. The initial state energy diagram for the rod is shown in Figure 16.16a and the initial state energy diagram for the disc is shown in Figure 16.16b.

The initial mechanical energy is then
Ei=Ui=m1g(l1−l12cosθi)+m2g(l1−l2cosθi)
At the bottom of the swing, θf=0, and the system has angular velocity ω f . The mechanical energy at the bottom of the swing is
Ef=Uf+Kf=m1gl12+m2g(l1−l2)+12ISω2f
with IS as found in Equation (16.3.17). There are no non-conservative forces acting, so the mechanical energy is constant therefore equating the expressions in (16.3.19) and (16.3.20) we get that
m1g(l1−l12cosθi)+m2g(l1−l2cosθi)=m1gl12+m2g(l1−l2)+12ISω2f
This simplifies to
(m1l12+m2l2)g(1−cosθi)=12ISω2f
We now solve for ωf (taking the positive square root to insure that we are calculating angular speed)
ωf=√2(m1l12+m2l2)g(1−cosθi)IS
Finally we substitute in Equation(16.3.17) in to Equation (16.3.23) and find
ωf=√2(m1l12+m2l2)g(1−cosθi)I1+Icm+m2l22
Note that we can rewrite Equation (16.3.22), using Equation (16.3.18) for the distance between the center of mass and the pivot point, to get
(m1+m2)lcmg(1−cosθi)=12ISω2f
We can interpret this equation as follows. Treat the system as a point particle of mass m1+m2 located at the center of mass lcm. Take the zero point of gravitational potential energy to be the point where the center of mass is at its lowest point, that is, θ=0. Then
Ei=(m1+m2)lcmg(1−cosθi)
Ef=12ISω2f
Thus conservation of energy reproduces Equation (16.3.25).