
17.5: Torque and Rotational Work




- Last updated
- Jul 20, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
When a constant torque τs,z is applied to an object, and the object rotates through an angle Δθ about a fixed z -axis through the center of mass, then the torque does an amount of work ΔW=τS,zΔθ on the object. By extension of the linear work-energy theorem, the amount of work done is equal to the change in the rotational kinetic energy of the object,
Wrot=12Icmω2f−12Icmω2i=Krot,f−Krot,i
The rate of doing this work is the rotational power exerted by the torque,
Prot ≡dWrot dt=limΔt→0ΔWrot Δt=τS,zdθdt=τS,zωz
Rotational Work
Consider a rigid body rotating about an axis. Each small element of mass Δmi in the rigid body is moving in a circle of radius (rS,i)⊥ about the axis of rotation passing through the point S. Each mass element undergoes a small angular displacement Δθ under the action of a tangential force, →Fθ,i=Fθ,iˆθ, where ˆθ is the unit vector pointing in the tangential direction (Figure 17.20). The element will then have an associated displacement vector for this motion, Δ→rS,i=riΔθˆθ and the work done by the tangential force is
ΔWrot, i=→Fθ,i⋅Δ→rS,i=(Fθ,iˆθ)⋅(riΔθˆθ)=riFθ,iΔθ
Recall the result of Equation (17.3.8) that the component of the torque (in the direction along the axis of rotation) about S due to the tangential force, →Fθ,i, acting on the mass element Δmi is
(τS,i)z=riFθ,i
and so Equation (17.4.10) becomes
ΔWrot ,i=(τS,i)zΔθ
Summing over all the elements yields
Wrot=∑iΔWrot,i=∑i((τS,i)z)Δθ=τS,zΔθ
the rotational work is the product of the torque and the angular displacement. In the limit of small angles, Δθ→dθ,ΔWrot →dWrot and the differential rotational work is
dWrot =τS,zdθ
We can integrate this amount of rotational work as the angle coordinate of the rigid body changes from some initial value θ=θi to some final value θ=θf,
Wrot=∫dWrot=∫θfθiτS,zdθ
Rotational Work-Kinetic Energy Theorem
We will now show that the rotational work is equal to the change in rotational kinetic energy. We begin by substituting our result from Equation (17.3.14) into Equation (17.4.14) for the infinitesimal rotational work,
dWrot =ISαzdθ
Recall that the rate of change of angular velocity is equal to the angular acceleration, αz≡dωz/dt and that the angular velocity is ωz≡dθ/dt. Note that in the limit of small displacement,
dωzdtdθ=dωzdθdt=dωzωz
Therefore the infinitesimal rotational work is
dWrot=ISαzdθ=ISdωzdtdθ=ISdωzdθdt=ISdωzωz
We can integrate this amount of rotational work as the angular velocity of the rigid body changes from some initial value ωz=ωz,i to some final value ωz=ωz,f,
Wrot=∫dWrot=∫ωz,fωz,iISdωzωz=12ISω2z,f−12ISω2z,i
When a rigid body is rotating about a fixed axis passing through a point S in the body, there is both rotation and translation about the center of mass unless S is the center of mass. If we choose the point S in the above equation for the rotational work to be the center of mass, then
Wrot=12Icmω2cm,f−12Icmω2cm,i=Krot,f−Krot,i≡ΔKrot
Note that because the z -component of the angular velocity of the center of mass appears as a square, we can just use its magnitude in Equation (17.4.20).
Rotational Power
The rotational power is defined as the rate of doing rotational work,
Prot≡dWrotdt
We can use our result for the infinitesimal work to find that the rotational power is the product of the applied torque with the angular velocity of the rigid body,
Prot≡dWrotdt=τS,zdθdt=τS,zωz
Example 17.12 Work Done by Frictional Torque
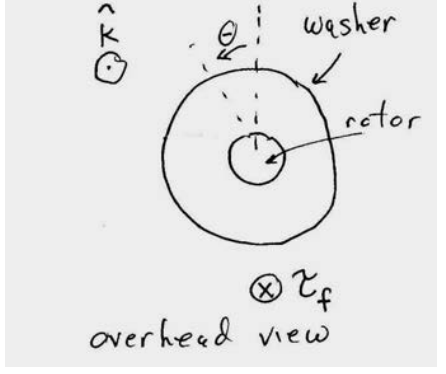
A steel washer is mounted on the shaft of a small motor. The moment of inertia of the motor and washer is I0. The washer is set into motion. When it reaches an initial angular velocity ω0, at t = 0, the power to the motor is shut off, and the washer slows down during a time interval Δt1=ta until it reaches an angular velocity of ωa at time ta. At that instant, a second steel washer with a moment of inertia Iw is dropped on top of the first washer. Assume that the second washer is only in contact with the first washer. The collision takes place over a time Δtint=tb−ta after which the two washers and rotor rotate with angular speed ωb. Assume the frictional torque on the axle (magnitude τf) is independent of speed, and remains the same when the second washer is dropped. (a) What angle does the rotor rotate through during the collision? (b) What is the work done by the friction torque from the bearings during the collision? (c) Write down an equation for conservation of energy. Can you solve this equation for ωb (d) What is the average rate that work is being done by the friction torque during the collision?
Solution: We begin by solving for the frictional torque during the first stage of motion when the rotor is slowing down. We choose a coordinate system shown in Figure 17.29.
The component of average angular acceleration is given by
α1=ωa−ω0ta<0
We can use the rotational equation of motion, and find that the frictional torque satisfies
−τf=I0(ωa−ω0Δt1)
During the collision, the component of the average angular acceleration of the rotor is given by
α2=ωb−ωa(Δtint )<0
The angle the rotor rotates through during the collision is (analogous to linear motion with constant acceleration)
Δθ2=ωaΔtint+12α2Δt2int=ωaΔtint+12(ωb−ωaΔtint)Δt2int=12(ωb+ωa)Δtint>0
The non-conservative work done by the bearing friction during the collision is
Wf,b=−τfΔθrotor=−τf12(ωa+ωb)Δtint
Using our result for the frictional torque, the work done by the bearing friction during the collision is
Wf,b=12I0(ωa−ω0Δt1)(ωa+ωb)Δtint<0
The negative work is consistent with the fact that the kinetic energy of the rotor is decreasing as the rotor is slowing down. Using the work energy theorem during the collision the kinetic energy of the rotor has deceased by
Wf,b=12(I0+Iw)ω2b−12I0ω2a
Using our result for the work, we have that
12I0(ωa−ω0Δt1)(ωa+ωb)Δtint=12(I0+Iw)ω2b−12I0ω2a
This is a quadratic equation for the angular speed ωb of the rotor and washer immediately after the collision that we can in principle solve. However remember that we assumed that the frictional torque is independent of the speed of the rotor. Hence the best practice would be to measure ω0,ωa,ωb,Δt1,Δtint,I0 and Iw and then determine how closely our model agrees with conservation of energy. The rate of work done by the frictional torque is given by
Pf=Wf,bΔtint=12I0(ωa−ω0Δt1)(ωa+ωb)<0