
20.6: Appendix 20A Chasles’s Theorem- Rotation and Translation of a Rigid Body





( \newcommand{\kernel}{\mathrm{null}\,}\)
We now return to our description of the translating and rotating rod that we first considered when we began our discussion of rigid bodies. We shall now show that the motion of any rigid body consists of a translation of the center of mass and rotation about the center of mass.
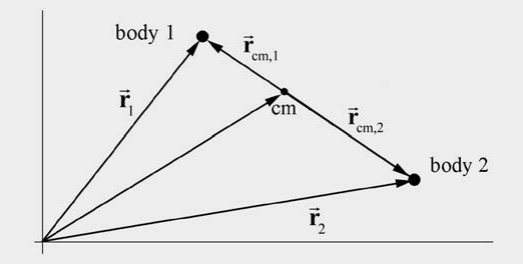
We shall demonstrate this for a rigid body by dividing up the rigid body into point-like constituents. Consider two point-like constituents with masses m1 and m2. Choose a coordinate system with a choice of origin such that body 1 has position →r1 and body 2 has position →r2 (Figure 20A.1). The relative position vector is given by
→r1,2=→r1−→r2

Recall we defined the center of mass vector, →Rcm of the two-body system as
→Rcm=m1→r1+m2→r2m1+m2
In Figure 20A.2 we show the center of mass coordinate system.
The position vector of the object 1 with respect to the center of mass is given by
→rcm,1=→r1−→Rcm=→r1−m1→r1+m2→r2m1+m2=m2m1+m2(→r1−→r2)=μm1→r1,2
where
μ=m1m2m1+m2
is the reduced mass. In addition, the relative position vector between the two objects is r independent of the choice of reference frame,
→r12=→r1−→r2=(→rcm,1+→Rcm)−(→rcm,2+→Rcm)=→rcm,1−→rcm,2=→rcm,1,2
Because the center of mass is at the origin in the center of mass reference frame,
m1→rcm,1+m2→rcm,2m1+m2=→0
Therefore
m1→rcm,1=−m2→rcm,2
m1|→rcm,1|=m2|→rcm,2|
The displacement of object 1 about the center of mass is given by taking the derivative of Equation (20.A.3),
d→rcm,1=μm1d→r1,2
A similar calculation for the position of object 2 with respect to the center of mass yields for the position and displacement with respect to the center of mass
→rcm,2=→r2−→Rcm=−μm2→r1,2
d→rcm,2=−μm2d→r1,2
Let i=1,2. An arbitrary displacement of the ith object is given respectively by
d→ri=d→rcm,i+d→Rcm
which is the sum of a displacement about the center of mass d→rcm,i and a displacement of the center of mass d→Rcm. The displacement of objects 1 and 2 are constrained by the condition that the distance between the objects must remain constant since the body is rigid. In particular, the distance between objects 1 and 2 is given by
|→r1,2|2=(→r1−→r2)⋅(→r1−→r2)
Because this distance is constant we can differentiate Equation (20.A.13), yielding the rigid body condition that
0=2(→r1−→r2)⋅(d→r1−d→r2)=2→r1,2⋅d→r1,2
20A.1. Translation of the Center of Mass
The condition (Equation (20.A.14)) can be satisfied if the relative displacement vector between the two objects is zero,
dr1,2=d→r1−d→r2=→0
This implies, using, Equation (20.A.9) and Equation (20.A.11), that the displacement with respect to the center of mass is zero,
d→rcm,1=d→rcm,2=→0
Thus by Equation (20.A.12), the displacement of each object is equal to the displacement of the center of mass,
d→ri=d→Rcm
which means that the body is undergoing pure translation.
20A.2 Rotation about the Center of Mass
Now suppose that d→r1,2=d→r1−d→r2≠→0 The rigid body condition can be expressed in terms of the center of mass coordinates. Using Equation (20.A.9), the rigid body condition (Equation (20.A.14)) becomes
0=2μm1→r1,2⋅d→rcm,1
Because the relative position vector between the two objects is independent of the choice of reference frame (Equation (20.A.5)), the rigid body condition Equation (20.A.14) in the center of mass reference frame is then given by
0=2→rcm,1,2⋅d→rcm,1
This condition is satisfied if the relative displacement is perpendicular to the line passing through the center of mass,
→rcm,1,2⊥d→rcm,1
By a similar argument, →rcm,1,2⊥d→rcm,2. In order for these displacements to correspond to a rotation about the center of mass, the displacements must have the same angular displacement.

In Figure 20A.3, the infinitesimal angular displacement of each object is given by
dθ1=|d→rcm,1||→rcm,1|
dθ2=|d→rcm,2||→rcm,2|
From Equation (20.A.9) and Equation (20.A.11), we can rewrite Equations (20.A.21) and (20.A.22) as
dθ1=μm1|d→r1,2||→rcm,1|
dθ2=μm2|d→r1,2||→rcm,2|
Recall that in the center of mass reference frame m1|→rcm,1|=m2|→rcm,2| (Equation (20.A.8)) and hence the angular displacements are equal,
dθ1=dθ2=dθ
Therefore the displacement of the ith object d→ri differs from the displacement of the center of mass d→Rcm by a vector that corresponds to an infinitesimal rotation in the center of mass reference frame
d→ri=d→Rcm+d→rcm,i
We have shown that the displacement of a rigid body is the vector sum of the displacement of the center of mass (translation of the center of mass) and an infinitesimal rotation about the center of mass.