
23.3: Energy and the Simple Harmonic Oscillator
( \newcommand{\kernel}{\mathrm{null}\,}\)
Let’s consider the block-spring system of Example 23.2 in which the block is initially stretched an amount x0>0 from the equilibrium position and is released from rest, vx,0=0. We shall consider three states: state 1, the initial state; state 2, at an arbitrary time in which the position and velocity are non-zero; and state 3, when the object first comes back to the equilibrium position. We shall show that the mechanical energy has the same value for each of these states and is constant throughout the motion. Choose the equilibrium position for the zero point of the potential energy.
State 1: all the energy is stored in the object-spring potential energy, U1=(1/2)kx20. The object is released from rest so the kinetic energy is zero, K1=0 The total mechanical energy is then
E1=U1=12kx20
State 2: at some time t , the position and x -component of the velocity of the object are given by
x(t)=x0cos(√kmt)vx(t)=−√kmx0sin(√kmt)
The kinetic energy is
K2=12mv2=12kx20sin2(√kmt)
and the potential energy is
U2=12kx2=12kx20cos2(√kmt)
The mechanical energy is the sum of the kinetic and potential energies
E2=K2+U2=12mv2x+12kx2=12kx20(cos2(√kmt)+sin2(√kmt))=12kx20
where we used the identity that cos2ω0t+sin2ω0t=1 and that ω0=√k/m (Equation (23.2.6)).
The mechanical energy in state 2 is equal to the initial potential energy in state 1, so the mechanical energy is constant. This should come as no surprise; we isolated the object spring system so that there is no external work performed on the system and no internal non-conservative forces doing work.

State 3: now the object is at the equilibrium position so the potential energy is zero, U3 = 0 , and the mechanical energy is in the form of kinetic energy (Figure 23.5).
E3=K3=12mv2eq
Because the system is closed, mechanical energy is constant,
E1=E3
Therefore the initial stored potential energy is released as kinetic energy,
12kx20=12mv2eq
and the x -component of velocity at the equilibrium position is given by
vx,eq=±√kmx0
Note that the plus-minus sign indicates that when the block is at equilibrium, there are two possible motions: in the positive x -direction or the negative x -direction. If we take x0>0, then the block starts moving towards the origin, and Vx,eq will be negative the first time the block moves through the equilibrium position.
We can show more generally that the mechanical energy is constant at all times as follows. The mechanical energy at an arbitrary time is given by
E=K+U=12mv2x+12kx2
Differentiate Equation (23.3.10)
dEdt=mvxdvxdt+kxdxdt=vx(md2xdt2+kx)
Now substitute the simple harmonic oscillator equation of motion, (Equation (23.2.1) ) into Equation (23.3.11) yielding
dEdt=0
demonstrating that the mechanical energy is a constant of the motion.
Simple Pendulum: Force Approach
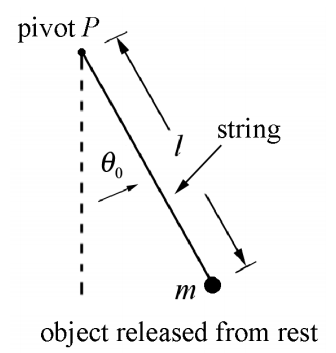
A pendulum consists of an object hanging from the end of a string or rigid rod pivoted about the point P . The object is pulled to one side and allowed to oscillate. If the object has negligible size and the string or rod is massless, then the pendulum is called a simple pendulum. Consider a simple pendulum consisting of a massless string of length l and a point-like object of mass m attached to one end, called the bob. Suppose the string is fixed at the other end and is initially pulled out at an angle θ0 from the vertical and released from rest (Figure 23.6). Neglect any dissipation due to air resistance or frictional forces acting at the pivot.
Let’s choose polar coordinates for the pendulum as shown in Figure 23.7a along with the free-body force diagram for the suspended object (Figure 23.7b). The angle θ is defined with respect to the equilibrium position. When θ>0, the bob is has moved to the right, and when θ<0, the bob has moved to the left. The object will move in a circular arc centered at the pivot point. The forces on the object are the tension in the string →T=−Tˆr and gravity m→g. The gravitation force on the object has ˆr- and ˆθ- component given by
m→g=mg(cosθˆr−sinθˆθ)


Our concern is with the tangential component of the gravitational force,
Fθ=−mgsinθ
The sign in Equation (23.3.14) is crucial; the tangential force tends to restore the pendulum to the equilibrium value θ=0. If θ>0,Fθ<0 and if θ<0,Fθ>0 where we are that because the string is flexible, the angle θ is restricted to the range −π/2<θ<π/2. (For angles |θ|>π/2 the string would go slack.) In both instances the tangential component of the force is directed towards the equilibrium position. The tangential component of acceleration is
aθ=lα=ld2θdt2
Newton’s Second Law, Fθ=maθ, yields
−mglsinθ=ml2d2θdt2
We can rewrite this equation is the form
d2θdt2=−glsinθ
This is not the simple harmonic oscillator equation although it still describes periodic motion. In the limit of small oscillations, sinθ≅θ, Equation (23.3.17) becomes
d2θdt2≅−glθ
This equation is similar to the object-spring simple harmonic oscillator differential equation
d2xdt2=−kmx
By comparison with Equation (23.2.6) the angular frequency of oscillation for the pendulum is approximately
ω0≃√gl
with period
T=2πω0≃2π√lg
The solutions to Equation (23.3.18) can be modeled after Equation (23.2.21). With the initial conditions that the pendulum is released from rest, dθdt(t=0)=0, at a small angle θ(t=0)=θ0, the angle the string makes with the vertical as a function of time is given by
θ(t)=θ0cos(ω0t)=θ0cos(2πTt)=θ0cos(√glt)
The z -component of the angular velocity of the bob is
ωz(t)=dθdt(t)=−√glθ0sin(√glt)
Keep in mind that the component of the angular velocity ωz=dθ/dt changes with time in an oscillatory manner (sinusoidally in the limit of small oscillations). The angular frequency ω0 is a parameter that describes the system. The z -component of the angular velocity ωz(t) besides being time-dependent, depends on the amplitude of oscillation θ0. In the limit of small oscillations, ω0 does not depend on the amplitude of oscillation.
The fact that the period is independent of the mass of the object follows algebraically from the fact that the mass appears on both sides of Newton’s Second Law and hence cancels. Consider also the argument that is attributed to Galileo: if a pendulum, consisting of two identical masses joined together, were set to oscillate, the two halves would not exert forces on each other. So, if the pendulum were split into two pieces, the pieces would oscillate the same as if they were one piece. This argument can be extended to simple pendula of arbitrary masses.
Simple Pendulum: Energy Approach
We can use energy methods to find the differential equation describing the time evolution of the angle θ. When the string is at an angle θ with respect to the vertical, the gravitational potential energy (relative to a choice of zero potential energy at the bottom of the swing where θ=0 as shown in Figure 23.8) is given by
U=mgl(1−cosθ)
The θ -component of the velocity of the object is given by vθ=l(dθ/dt) so the kinetic energy is
K=12mv2=12m(ldθdt)2

The mechanical energy of the system is then
E=K+U=12m(ldθdt)2+mgl(1−cosθ)
Because we assumed that there is no non-conservative work (i.e. no air resistance or frictional forces acting at the pivot), the energy is constant, hence
0=dEdt=12m2l2dθdtd2θdt2+mglsinθdθdt=ml2dθdt(d2θdt2+glsinθ)
There are two solutions to this equation; the first one dθ/dt=0 is the equilibrium solution. That the z -component of the angular velocity is zero means the suspended object is not moving. The second solution is the one we are interested in
d2θdt2+glsinθ=0
which is the same differential equation (Equation (23.3.16)) that we found using the force method.
We can find the time t1 that the object first reaches the bottom of the circular arc by setting θ(t1)=0 in Equation (23.3.22)
0=θ0cos(√glt1)
This zero occurs when the argument of the cosine satisfies
√glt1=π2
The z -component of the angular velocity at time t1 is therefore
dθdt(t1)=−√glθ0sin(√glt1)=−√glθ0sin(π2)=−√glθ0
Note that the negative sign means that the bob is moving in the negative ˆθ-direction when it first reaches the bottom of the arc. The θ-component of the velocity at time t1 is therefore
vθ(t1)≡v1=ldθdt(t1)=−l√glθ0sin(√glt1)=−√lgθ0sin(π2)=−√lgθ0⋅(23.3.32)
We can also find the components of both the velocity and angular velocity using energy methods. When we release the bob from rest, the energy is only potential energy
E=U0=mgl(1−cosθ0)≅mglθ202
where we used the approximation that cosθ0≅1−θ20/2. When the bob is at the bottom of the arc, the only contribution to the mechanical energy is the kinetic energy given by
K1=12mv21
Because the energy is constant, we have that U0=K1 or
mglθ202=12mv21
We can solve for the θ -component of the velocity at the bottom of the arc
vθ,1=±√glθ0
The two possible solutions correspond to the different directions that the motion of the bob can have when at the bottom. The z -component of the angular velocity is then
dθdt(t1)=v1l=±√glθ0
in agreement with our previous calculation.
If we do not make the small angle approximation, we can still use energy techniques to find the θ-component of the velocity at the bottom of the arc by equating the energies at the two positions
mgl(1−cosθ0)=12mv21
vθ,1=±√2gl(1−cosθ0)
Simple Pendulum: Energy Approach
We can use energy methods to find the differential equation describing the time evolution of the angle θ. When the string is at an angle θ with respect to the vertical, the gravitational potential energy (relative to a choice of zero potential energy at the bottom of the swing where θ=0 as shown in Figure 23.8) is given by
U=mgl(1−cosθ)
The θ -component of the velocity of the object is given by vθ=l(dθ/dt) so the kinetic energy is
K=12mv2=12m(ldθdt)2
The mechanical energy of the system is then
E=K+U=12m(ldθdt)2+mgl(1−cosθ)
Because we assumed that there is no non-conservative work (i.e. no air resistance or frictional forces acting at the pivot), the energy is constant, hence
0=dEdt=12m2l2dθdtd2θdt2+mglsinθdθdt=ml2dθdt(d2θdt2+glsinθ)
There are two solutions to this equation; the first one dθ/dt=0 is the equilibrium solution. That the z -component of the angular velocity is zero means the suspended object is not moving. The second solution is the one we are interested in
d2θdt2+glsinθ=0
which is the same differential equation (Equation (23.3.16)) that we found using the force method.
We can find the time t1 that the object first reaches the bottom of the circular arc by setting θ(t1)=0 in Equation (23.3.22)
0=θ0cos(√glt1)
This zero occurs when the argument of the cosine satisfies
√glt1=π2
The z -component of the angular velocity at time t1 is therefore
dθdt(t1)=−√glθ0sin(√glt1)=−√glθ0sin(π2)=−√glθ0
Note that the negative sign means that the bob is moving in the negative ˆθ-direction when it first reaches the bottom of the arc. The θ-component of the velocity at time t1 is therefore
vθ(t1)≡v1=ldθdt(t1)=−l√glθ0sin(√glt1)=−√lgθ0sin(π2)=−√lgθ0⋅(23.3.32)
We can also find the components of both the velocity and angular velocity using energy methods. When we release the bob from rest, the energy is only potential energy
E=U0=mgl(1−cosθ0)≅mglθ202
where we used the approximation that cosθ0≅1−θ20/2. When the bob is at the bottom of the arc, the only contribution to the mechanical energy is the kinetic energy given by
K1=12mv21
Because the energy is constant, we have that U0=K1 or
mglθ202=12mv21
We can solve for the θ -component of the velocity at the bottom of the arc
vθ,1=±√glθ0
The two possible solutions correspond to the different directions that the motion of the bob can have when at the bottom. The z -component of the angular velocity is then
dθdt(t1)=v1l=±√glθ0
in agreement with our previous calculation.
If we do not make the small angle approximation, we can still use energy techniques to find the θ-component of the velocity at the bottom of the arc by equating the energies at the two positions
mgl(1−cosθ0)=12mv21
vθ,1=±√2gl(1−cosθ0)