
25.9: Appendix 25B Properties of an Elliptical Orbit

( \newcommand{\kernel}{\mathrm{null}\,}\)
25B.1 Coordinate System for the Elliptic Orbit
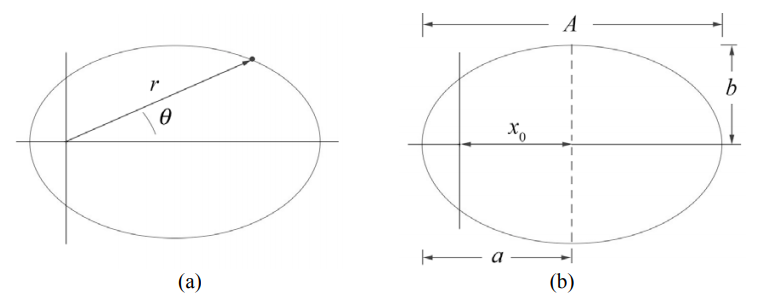
We now consider the special case of an elliptical orbit. Choose coordinates with the central point located at one focal point and coordinates (r,θ) for the position of the single body (Figure 25B.1a). In Figure 25B.1b, let a denote the semi-major axis, b denote the semi-minor axis and x0 denote the distance from the center of the ellipse to the origin of our coordinate system.
25B.2 The Semi-major Axis
Recall the orbit equation, Eq, (25.A.9), describes r(θ),
r(θ)=r01−εcosθ
The major axis A = 2a is given by
A=2a=ra+rp
where the distance of furthest approach ra occurs when θ=0, hence
ra=r(θ=0)=r01−ε
and the distance of nearest approach rp occurs when θ=π, hence
rp=r(θ=π)=r01+ε
Figure 25B.2 shows the distances of nearest and furthest approach.

We can now determine the semi-major axis
a=12(r01−ε+r01+ε)=r01−ε2
The semilatus rectum r0 can be re-expressed in terms of the semi-major axis and the eccentricity,
r0=a(1−ε2)
We can now express the distance of nearest approach, Equation (25.B.4), in terms of the semi-major axis and the eccentricity,
rp=r01+ε=a(1−ε2)1+ε=a(1−ε)
In a similar fashion the distance of furthest approach is
ra=r01−ε=a(1−ε2)1−ε=a(1+ε)
25B.2.3 The Location x0 of the Center of the Ellipse
From Figure 25B.3a, the distance from a focus point to the center of the ellipse is
x0=a−rp

Using Equation (25.B.7) for rp, we have that
x0=a−a(1−ε)=εa
25B.2.4 The Semi-minor Axis
From Figure 25B.3b, the semi-minor axis can be expressed as
b=√(r2b−x20)
where
rb=r01−εcosθb
We can rewrite Equation (25.B.12) as
rb−rbεcosθb=r0
The horizontal projection of rb is given by (Figure 25B.2b),
x0=rbcosθb
which upon substitution into Equation (25.B.13) yields
rb=r0+εx0
Substituting Equation (25.B.10) for x0 and Equation (25.B.6) for r0 into Equation (25.B.15) yields
rb=a(1−ε2)+aε2=a
The fact that rb=a is a well-known property of an ellipse reflected in the geometric construction, that the sum of the distances from the two foci to any point on the ellipse is a constant. We can now determine the semi-minor axis b by substituting Equation (25.B.16) into Equation (25.B.11) yielding
b=√(r2b−x20)=√a2−ε2a2=a√1−ε2
25B.2.5 Constants of the Motion for Elliptic Motion
We shall now express the parameters a , b and x0 in terms of the constants of the motion L , E , μ, m1 and m2. Using our results for r0 and ε from Equations (25.3.13) and (25.3.14) we have for the semi-major axis
a=L2μGm1m21(1−(1+2EL2/μ(Gm1m2)2))=−Gm1m22E
The energy is then determined by the semi-major axis,
E=−Gm1m22a
The angular momentum is related to the semilatus rectum r0 by Equation (25.3.13). Using Equation (25.B.6) for r0, we can express the angular momentum (25.B.4) in terms of the semi-major axis and the eccentricity,
L=√μGm1m2r0=√μGm1m2a(1−ε2)
Note that
√(1−ε2)=L√μGm1m2a
Thus, from Equations (25.3.14), (25.B.10), and (25.B.18), the distance from the center of the ellipse to the focal point is
x0=εa=−Gm1m22E√(1+2EL2/μ(Gm1m2)2)
a result we will return to later. We can substitute Equation (25.B.21) for √1−ε2 into Equation (25.B.17), and determine that the semi-minor axis is
b=√aL2/μGm1m2
We can now substitute Equation (25.B.18) for a into Equation (25.B.23), yielding
b=√aL2/μGm1m2=L√−Gm1m22E/μGm1m2=L√−12μE
25B.2.6 Speeds at Nearest and Furthest Approaches
At nearest approach, the velocity vector is tangent to the orbit (Figure 25B.4), so the magnitude of the angular momentum is
L=μrpvp
and the speed at nearest approach is
vp=L/μrp

Using Equation (25.B.20) for the angular momentum and Equation (25.B.7) for r p , Equation (25.B.26) becomes
vp=Lμrp=√μGm1m2(1−ε2)μa(1−ε)=√Gm1m2(1−ε2)μa(1−ε)2=√Gm1m2(1+ε)μa(1−ε)
A similar calculation show that the speed va at furthest approach,
va=Lμra=√μGm1m2(1−ε2)μa(1+ε)=√Gm1m21−ε2μa(1+ε)2=√Gm1m2(1−ε)μa(1+ε)