
3.2: Moment of Force



- Last updated
- Aug 8, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
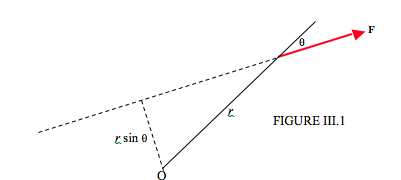
First, let’s look at a familiar two-dimensional situation. In Figure III.1 I draw a force
Force times perpendicular distance from O to the line of action of
Alternatively, (Figure III.2) the moment can be defined equally well by
Transverse component of force times distance from O to the point of application of the force.
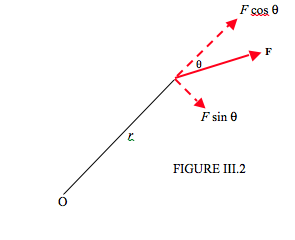
Either way, the magnitude of the moment of the force, also known as the torque, is
Now let me ask a question. Is it correct to say the moment of a force with respect to (or “about”) a point or with respect to (or “about”) an axis?
In the above two-dimensional example, it does not matter, but now let me move on to three dimensions, and I shall try to clarify.
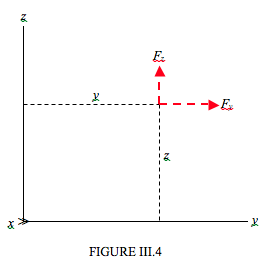
In Figure III.3, I draw a set of rectangular axes, and a force
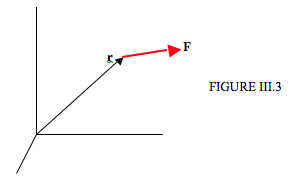
The moment, or torque, of
The
where
The dimensions of moment of a force, or torque, are ML2T-2, and the SI units are N m. (It is best to leave the units as N m rather than to express torque in joules.)