
27.3: Free Motion of a Symmetrical Top

( \newcommand{\kernel}{\mathrm{null}\,}\)
As a warm up in using Euler’s angles, we’ll redo the free symmetric top covered in the last lecture. With no external torques acting the top will have constant angular momentum →L.
We’ll take →L in the fixed Z direction. The axis of the top is along x3.
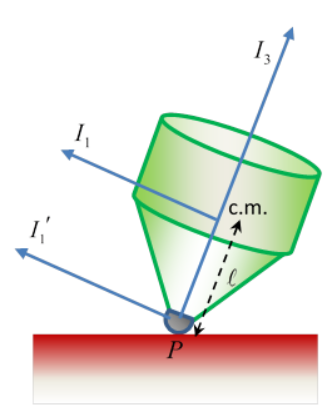
Taking the x1 axis along the line of nodes ON (Figure 27.3.1) at the instant considered, the constant angular
→L=(I1Ω1,I1Ω2,I3Ω3)=(I1˙θ,I1˙ϕsinθ,I3(˙ϕcosθ+˙ψ))

Remember, this new x1 axis (Figure 27.3.1) is perpendicular to the Z axis we’ve taken →L along, so L1=I1˙θ=0, and θ is constant, meaning that the principal axis x3 describes a cone around the constant angular momentum vector →L. The rate of precession follows from the constancy of L2=I1˙ϕsinθ. Writing the absolute magnitude of the angular momentum as L, L2=Lsinθ (remember L is in the Z direction, and x1 is momentarily along ON ) so the rate of precession ˙ϕ=L/I1. Finally, the component of →L along the x3 axis of symmetry of the top is Lcosθ=I3Ω3, so the top’s spin along its own axis is Ω3=(L/I3)cosθ.