27.4: Motion of Symmetrical Top around a Fixed Base with Gravity - Nutation

( \newcommand{\kernel}{\mathrm{null}\,}\)
Denoting the distance of the center of mass from the fixed bottom point P as ℓ (along the axis) the moment of inertia about a line perpendicular to the axis at the base point is
I′1=I1+Mℓ2
(I1 being usual center of mass moment.)
The Lagrangian is ( P being the origin, I3 in direction θ,ϕ)
L=12I′1(˙ϕ2sin2θ+˙θ2)+12I3(˙ϕcosθ+˙ψ)2−Mgℓcosθ
Notice that the coordinates ψ,ϕ do not appear explicitly, so there are two constants of motion:
pψ=∂L/∂˙ψ=I3(˙ϕcosθ+˙ψ)=L3pϕ=∂L/∂˙ϕ=(I′1sin2θ+I3cos2θ)˙ϕ+I3˙ψcosθ=LZ
That is, the angular momentum about x3 is conserved, because the two forces acting on the top, the gravitational pull at the center of mass and the floor reaction at the bottom point, both act along lines intersecting the axis, so never have torque about x3. The angular momentum about Z is conserved because the gravitational torque acts perpendicular to this line.
We have two linear equations in ˙ψ,˙ϕ with coefficients depending on θ and the two constants of motion L3,LZ. The solution is straightforward, giving
˙ϕ=LZ−L3cosθI′1sin2θ
and
˙ψ=L3I3−cosθ(LZ−L3cosθI′1sin2θ)
The (conserved) energy
E=12I′1(Ω21+Ω22)+12I3Ω23+Mgℓcosθ=12I′1(˙ϕ2sin2θ+˙θ2)+12I3(˙ϕcosθ+˙ψ)2+Mgℓcosθ
Using the constants of motion to express ˙ψ,˙ϕ in terms of θ and the constants LZ,L3, then subtracting a θ independent term to reduce clutter,
E′=E−Mgℓ−(L23/2I3)
we have
E′=12I′1˙θ2+Veff(θ),Veff(θ)=(LZ−L3cosθ)22I′1sin2θ−Mgℓ(1−cosθ)
The range of motion in θ is given by E′>Veff(θ). For L3≠LZ,Veff(θ) goes to infinity at θ=0,π It has a single minimum between these points. (This isn’t completely obvious—one way to see it is to change variable to u=cosθ, following Goldstein. Multiplying throughout by sin2θ, and writing ˙θ2sin2θ=˙u2 gives a one dimensional particle in a potential problem, and the potential is a cubic in u. Of course some roots of E′=Veff(θ) could be in the unphysical region |u|>1. In any case, there are at most three roots, so since the potential is positive and infinite at θ=0,π it has at most two roots in the physical range.)
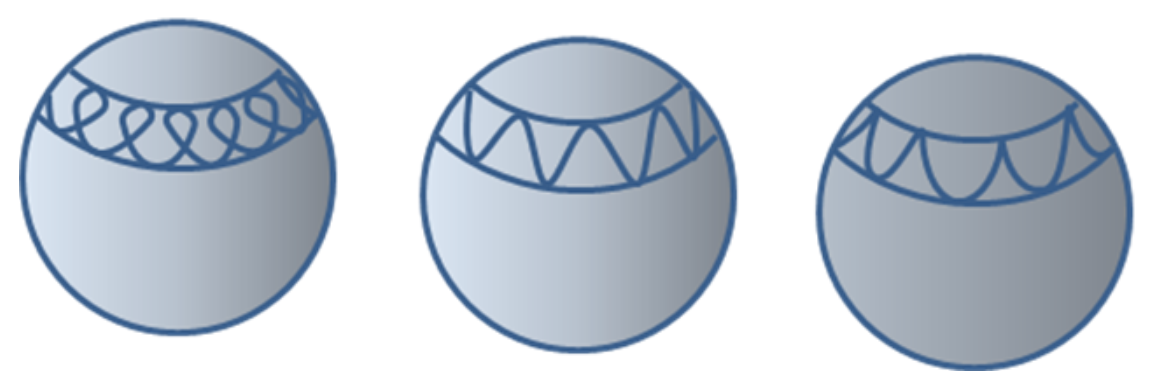
From the one-dimensional particle in a potential analogy, it’s clear that θ oscillates between these two points θ1 and θ2. This oscillation is called nutation. Now
˙ϕ=(LZ−L3cosθ)/I′1sin2θ
could change sign during this oscillation, depending on whether or not the angle cos−1(LZ/L3) is in the range. Visualizing the path of the top center point on a spherical surface centered at the fixed point, as it goes around it oscillates up and down, but if there is this sign change, it will “loop the loop”, going backwards on the top part of the loop.