
6.7: Applications to unconstrained systems





( \newcommand{\kernel}{\mathrm{null}\,}\)
Although most dynamical systems involve constrained motion, it is useful to consider examples of systems subject to conservative forces with no constraints . For no constraints, the Lagrange-Euler equations (6.6.1) simplify to ΛjL=0 where j=1,2,..n, and the transformation to generalized coordinates is of no consequence.
Example 6.7.1: Motion of a free particle, U=0
The Lagrangian in cartesian coordinates is L=12m(˙x2+˙y2+˙z2). Then
∂L∂˙x=m˙x∂L∂˙y=m˙y∂L∂˙z=m˙z∂L∂x=∂L∂y=∂L∂z=0
Insert these in the Lagrange equation gives
ΛxL=ddt∂L∂˙x−∂L∂x=ddtm˙x−0=0
Thus
px=m˙x=constantpy=m˙y=constant pz=m˙z=constant
That is, this shows that the linear momentum is conserved if U is a constant, that is, no forces apply. Note that momentum conservation has been derived without any direct reference to forces.
Example 6.7.2: Motion in a uniform gravitational field
Consider the motion is in the x−y plane. The kinetic energy T=12m(.x2+.y2) while the potential energy is U=mgy where U(y=0)=0. Thus
L=12m(.x2+.y2)−mgy
Using the Lagrange equation for the x coordinate gives
ΛxL=ddt∂L∂.x−∂L∂x=ddtm.x−0=0
Thus the horizontal momentum m˙x is conserved and ..x=0. The y coordinate gives
ΛyL=ddt∂L∂.y−∂L∂y=ddtm.y+mg=0
Thus the Lagrangian produces the same results as derived using Newton’s Laws of Motion.
¨x=0
y=−g
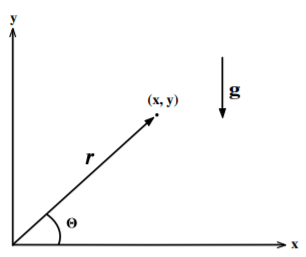
The importance of selecting the most convenient generalized coordinates is nicely illustrated by trying to solve this problem using polar coordinates r,θ, where r is radial distance and θ the elevation angle from the x axis as shown in the adjacent figure. Then
T=12m.r2+12m(r.θ)2
U=mgrsinθ
Thus
L=12m.r2+12m(r˙θ)2−mgrsinθ
ΛrL=0 for the r coordinate
r˙θ2−gsinθ−¨r=0
ΛθL=0 for the θ coordinate
−grcosθ−2r˙r˙θ−r2¨θ=0
These equations written in polar coordinates are more complicated than the result expressed in Cartesian coordinates. This is because the potential energy depends directly on the y coordinate, whereas it is a function of both r,θ. This illustrates the freedom for using different generalized coordinates, plus the importance of choosing a sensible set of generalized coordinates.
Example 6.7.3: Central forces
Consider a mass m moving under the influence of a spherically-symmetric, conservative, attractive, inverse-square force. The potential then is
U=−kr
It is natural to express the Lagrangian in spherical coordinates for this system. That is,
L=12m˙r2+12m(r˙θ)2+12m(rsinθ˙ϕ)2+kr
ΛrL=0 for the r coordinate gives m¨r−mr[˙θ2+sin2θ˙ϕ2]=kr2
where the mrsin2θ˙ϕ2 term comes from the centripetal acceleration.
ΛϕL=0 for the ϕ coordinate gives
ddt(mr2sin2θ˙ϕ)=0
This implies that the derivative of the angular momentum about the ϕ axis, ˙pϕ=0 and thus pϕ=mr2sin2θ˙ϕ is a constant of motion.
ΛθL=0 for the θ coordinate gives
ddt(mr2˙θ)−mr2sinθcosθ˙ϕ2=0
That is, ˙pθ=mr2sinθcosθ˙ϕ2=p2ϕcosθ2mr2sin3θ
Note that pθ is a constant of motion if pϕ=0 and only the radial coordinate is influenced by the radial form of the central potential.