
13.3: Rigid-body Rotation about a Body-Fixed Point




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
With respect to some point O fixed in the body coordinate system, the angular momentum of the body \alpha is given by
\mathbf{L} = \sum^{n}_i \mathbf{L}_i = \sum^n_i \mathbf{r}_i \times \mathbf{p}_i
There are two especially convenient choices for the fixed point O. If no point in the body is fixed with respect to an inertial coordinate system, then it is best to choose O as the center of mass. If one point of the body is fixed with respect to a fixed inertial coordinate system, such as a point on the ground where a child’s spinning top touches, then it is best to choose this stationary point as the body-fixed point O.
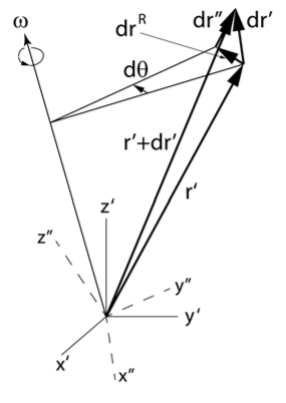
Consider a rigid body composed of N particles of mass m_{\alpha} where \alpha = 1, 2, 3, \dots N. As discussed in chapter 12.4, if the body rotates with an instantaneous angular velocity \boldsymbol{\omega} about some fixed point, with respect to the body-fixed coordinate system, and this point has an instantaneous translational velocity \mathbf{V} with respect to the fixed (inertial) coordinate system, see Figure \PageIndex{1}, then the instantaneous velocity \mathbf{v}_{\alpha} of the \alpha^{th} particle in the fixed frame of reference is given by
\mathbf{v}_{\alpha} = \mathbf{V} + \mathbf{v}^{\prime\prime}_{\alpha} + \boldsymbol{\omega} \times \mathbf{r}^{\prime}_{\alpha}
However, for a rigid body, the velocity of a body-fixed point with respect to the body is zero, that is \mathbf{v}^{\prime\prime}_{\alpha} = 0, thus
\mathbf{v}_{\alpha} = \mathbf{V} + \boldsymbol{\omega} \times \mathbf{r}^{\prime}_{ \alpha}
Consider the translational velocity of the body-fixed point O to be zero, i.e. \mathbf{V} = 0 and let \mathbf{R} = 0, then \mathbf{r}_{\alpha} = \mathbf{r}^{\prime}_{\alpha}. These assumptions allow the linear momentum of the particle \alpha to be written as
\mathbf{p}_{\alpha} = m_{\alpha} \mathbf{v}_{\alpha} = m_{\alpha} \boldsymbol{\omega} \times \mathbf{ r}_{\alpha}
Therefore
\mathbf{L} = \sum^N_{\alpha} \mathbf{r}_{\alpha} \times \mathbf{ p}_{\alpha} = \sum^N_{\alpha} m_{\alpha} \mathbf{r}_{\alpha} \times (\boldsymbol{\omega} \times\mathbf{ r}\alpha )
Using the vector identity
\mathbf{A} \times (\mathbf{B} \times \mathbf{ A}) = A^2\mathbf{B} − \mathbf{A} (\mathbf{A} \cdot \mathbf{B}) \notag
leads to
\mathbf{L} = \sum^{N}_{\alpha} m_{\alpha} [r^2_{\alpha} \boldsymbol{\omega} − \mathbf{r}_{\alpha} (\mathbf{r}_{\alpha} \cdot \boldsymbol{\omega}) ]
The angular momentum can be expressed in terms of components of \boldsymbol{\omega} and \mathbf{r}^{\prime}_{\alpha} relative to the body-fixed frame. The following formulae can be written more compactly if \mathbf{r}_{\alpha} = (x_{\alpha }, y_{\alpha} , z_{\alpha} ), in the rotating body-fixed frame, is written in the form \mathbf{r}_{\alpha} = (x_{\alpha ,1}, y_{\alpha ,2} , z_{\alpha ,3} ) where the axes are defined by the numbers 1, 2, 3 rather than x, y, z. In this notation, the angular momentum is written in component form as
L_{i}=\sum_{\alpha}^{N} m_{\alpha}\left[\omega_{i} \sum_{k} x_{\alpha, k}^{2}-x_{\alpha, i}\left(\sum_{j} x_{\alpha, j} \omega_{j}\right)\right] \label{13.9}
Assume the Kronecker delta relation
\omega_i = \sum^3_j \omega_j \delta_{ij} \label{13.10}
where
\begin{aligned} \delta_{ij} & = & 1 && i=j \\ \delta_{ij} & = & 0 && i \neq j \end{aligned}
Substitute \ref{13.10} in \ref{13.9} gives
\begin{align} L_{i} &=\sum_{\alpha}^{N} m_{\alpha} \sum_{j}\left[\omega_{j} \delta_{i j} \sum_{k} x_{\alpha, k}^{2}-\omega_{j} x_{\alpha, i} x_{\alpha, j}\right] \notag \\ &=\sum_{j}^{3} \omega_{j}\left[\sum_{\alpha}^{N} m_{\alpha}\left(\delta_{i j} \sum_{k} x_{\alpha, k}^{2}-x_{\alpha, i} x_{\alpha, j}\right)\right] \end{align}