
13.18: Lagrange equations of motion for rigid-body rotation





( \newcommand{\kernel}{\mathrm{null}\,}\)
The Euler equations of motion were derived using Newtonian concepts of torque and angular momentum. It is of interest to derive the equations of motion using Lagrangian mechanics. It is convenient to use a generalized torque N and assume that U=0 in the Lagrange-Euler equations. Note that the generalized force is a torque since the corresponding generalized coordinate is an angle, and the conjugate momentum is angular momentum. If the body-fixed frame of reference is chosen to be the principal axes system, then, since the inertia tensor is diagonal in the principal axis frame, the kinetic energy is given in terms of the principal moments of inertia as
T=12∑iIiω2i
Using the Euler angles as generalized coordinates, then the Lagrange equation for the specific case of the ψ coordinate and including a generalized force Nψ gives
ddt∂T∂˙ψ−∂T∂ψ=Nψ
which can be expressed as
ddt3∑i∂T∂ωi∂ωi∂˙ψ−3∑i∂T∂ωi∂ωi∂ψ=Nψ
Equation ??? gives
∂T∂ωi=Iiωi
Differentiating the angular velocity components in the body-fixed frame, equations (13.14.1−13.14.3) give
| ∂ω1∂ψ=˙ϕsinθcosψ−˙θsinψ=ω2 | ∂ω1∂˙ψ=∂ω2∂˙ψ=0 |
| ∂ω2∂ψ=−˙ϕsinθsinψ−˙θcosψ=−ω1 | ∂ω1∂˙ψ=∂ω2∂˙ψ=0 |
| ∂ω3∂ψ=0 | ∂ω3∂˙ψ=1 |
Substituting these into the Lagrange Equation ??? gives
ddtI3ω3−I1ω1ω2+I2ω2(−ω1)=N3
since the ψ and ^e3 axes are colinear. This can be rewritten as
I3˙ω3−(I1−I2)ω1ω2=N3
Any axis could have been designated the ^e3 axis, thus the above equation can be generalized to all three axes to give
I1˙ω1−(I2−I3)ω2ω3=N1I2˙ω2−(I3−I1)ω3ω1=N2I3˙ω3−(I1−I2)ω1ω2=N3
These are the Euler’s equations given previously in (13.17.6). Note that although ˙ω3 is the equation of motion for the ψ coordinate, this is not true for the ϕ and θ rotations which are not along the body-fixed x1 and x2 axes as given in table 13.14.1.
Example 13.18.1: Rotation of a dumbbell
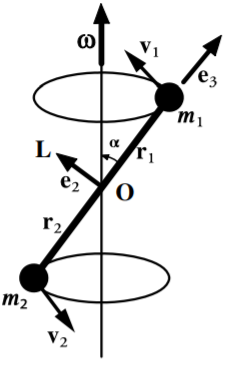
Consider the motion of the symmetric dumbbell shown in the adjacent figure. Let |r1|=|r2|=b. Let the body-fixed coordinate system have its origin at O and symmetry axis ^e3 be along the weightless shaft toward m1 and vα=vαˆe1. The angular momentum is given by
L=∑imir×v
Because L is perpendicular to the shaft, and L rotates around ω as the shaft rotates, let ^e2 be along L.
L=L2^e2
If α is the angle between ω and the shaft, the components of ω are
ω1=0ω2=ωsinαω3=ωcosα
Assume that the principal moments of the dumbbell are
I1=(m1+m2)b2I2=(m1+m2)b2I3=0
Thus the angular momentum is given by
L1=I1ω1=0L2=I2ω2=(m1+m2)b2ωsinαL3=I3ω3=0
which is consistent with the angular momentum being along the ^e2 axis.
Using Euler’s equations, and assuming that the angular velocity is constant, i.e. ˙ω=0, then the components of the torque required to satisfy this motion are
N1=−(m1+m2)b2ω2sinαcosαN2=0N3=0
That is, this motion can only occur in the presence of the above applied torque which is in the direction −^e1, that is, mutually perpendicular to ^e2 and ^e3. This torque can be written as N=ω×L.