
13.21: Torque-free rotation of an asymmetric rigid rotor





( \newcommand{\kernel}{\mathrm{null}\,}\)
The Euler equations of motion for the case of torque-free rotation of an asymmetric (triaxial) rigid rotor about the center of mass, with principal moments of inertia I1≠I2≠I3, lead to more complicated motion than for the symmetric rigid rotor.3 The general features of the motion of the asymmetric rotor can be deduced using the conservation of angular momentum and rotational kinetic energy.
Assuming that the external torques are zero then the Euler equations of motion can be written as
I1˙ω1=(I2−I3)ω2ω3I2˙ω2=(I3−I1)ω3ω1I3˙ω3=(I1−I2)ω1ω2
Since Li=Iiωi for i=1,2,3, then Equation 13.21.1 gives
I2I3˙L1=(I2−I3)L2L3I1I3˙L2=(I3−I1)L3L1I1I2˙L3=(I1−I2)L1L2
Multiply the first equation by I1L1, the second by I2L2 and the third by I3L3 and sum, which gives
I1I2I3(L1˙L1+L2˙L2+L3˙L3)=0
The bracket is equivalent to ddt(L21+L22+L23)=0 which implies that the total rotational angular momentum L is a constant of motion as expected for this torque-free system, even though the individual components L1,L2,L3 may vary. That is
L21+L22+L23=L2
Note that equation ??? is the equation of a sphere of radius L.
Multiply the first equation of 13.21.3 by L1, the second by L2, and the third by L3, and sum gives
I2I3L1˙L1+I1I3L2˙L2+I1I2L3˙L3=0
Divide ??? by I1I2I3 gives ddt(L212I1+L222I2+L232I3)=0. This implies that the total rotational kinetic energy T, given by
L212I1+L222I2+L232I3=T
is a constant of motion as expected when there are no external torques and zero energy dissipation. Note that ??? is the equation of an ellipsoid.
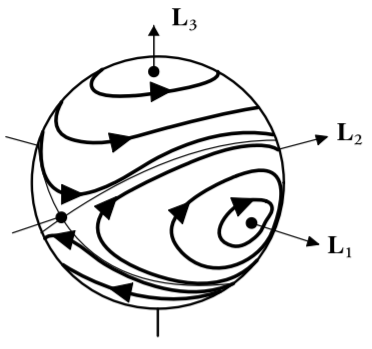
Equations ??? and ??? both must be satisfied by the rotational motion for any value of the total angular momentum L and kinetic energy T. Fig 13.21.1 shows a graphical representation of the intersection of the L sphere and T ellipsoid as seen in the body-fixed frame. The angular momentum vector L must follow the constant-energy contours given by where the T-ellipsoids intersect the L-sphere, shown for the case where I3>I2>I1. Note that the precession of the angular momentum vector L follows a trajectory that has closed paths that circle around the principal axis with the smallest I, that is, ˆe1, or the principal axis with the maximum I, that is, ˆe3. However, the angular momentum vector does not have a stable minimum for precession around the intermediate principal moment of inertia axis ˆe2. In addition to the precession, the angular momentum vector L executes nutation, that is a nodding of the angle θ. For any fixed value of L, the kinetic energy has upper and lower bounds given by
L22I3≤T≤L22I1
Thus, for a given value of L, when T=Tmin=L22I3, the orientation of L in the body-fixed frame is either (0,0,+L) or (0,0,−L), that is, aligned with the ˆe3 axis along which the principal moment of inertia is largest. For slightly higher kinetic energy the trajectory of L follows closed paths precessing around ˆe3. When the kinetic energy T=L222I2 the angular momentum vector L follows either of the two thin-line trajectories each of which are a separatrix. These do not have closed orbits around ˆe2 and they separate the closed solutions around either ˆe3 or ˆe1. For higher kinetic energy the precessing angular momentum vector follows closed trajectories around ˆe1 and becomes fully aligned with ˆe1 at the upper-bound kinetic energy.
Note that for the special case when I3>I2=I1, then the asymmetric rigid rotor equals the symmetric rigid rotor for which the solutions of Euler’s equations were solved exactly in chapter 13.19. For the symmetric rigid rotor the T-ellipsoid becomes a spheroid aligned with the symmetry axis and thus the intersections with the L-sphere lead to circular paths around the ˆe3 body-fixed principal axis, while the separatrix circles the equator corresponding to the ˆe3 axis separating clockwise and anticlockwise precession about L3. This discussion shows that energy, plus angular momentum conservation, provide the general features of the solution for the torque-free symmetric top that are in agreement with those derived using Euler’s equations of motion.
3Similar discussions of the freely-rotating asymmetric top are given by Landau and Lifshitz [La60] and by Gregory [Gr06].