
13.E: Rigid-body Rotation (Exercises)




- Last updated
- Aug 6, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
1. A hollow spherical shell has a mass m and radius R.
- Calculate the inertia tensor for a set of coordinates whose origin is at the center of mass of the shell.
- Now suppose that the shell is rolling without slipping toward a step of height h, where h<R. The shell has a linear velocity v. What is the angular momentum of the shell relative to the tip of the step?
- The shell now strikes the tip of the step inelastically (so that the point of contact sticks to the step, but the shell can still rotate about the tip of the step). What is the angular momentum of the shell immediately after contact?
- Finally, find the minimum velocity which enables the shell to surmount the step. Express your result in terms of m, g, R, and h.
2. The vectors ˆx, ˆy, and ˆz constitute a set of orthogonal right-handed axes. The vectors ˆx+ˆy−2ˆz, −ˆx+ˆy, and ˆx+ˆy+ˆz are also perpendicular to one another.
- Write out the set of direction cosines relating the new axes to the old.
- How are the Eulerian angles defined? Describe this transformation by a set of Eulerian angles.
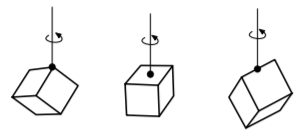
3. A torsional pendulum consists of a vertical wire attached to a mass which can rotate about the vertical axis. Consider three torsional pendula which consist of identical wires from which identical homogeneous solid cubes are hung. One cube is hung from a corner, one from midway along an edge, and one from the middle of a face as shown. What are the ratios of the periods of the three pendula?
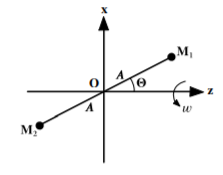
4. A dumbbell comprises two equal point masses M connected by a massless rigid rod of length 2A which is constrained to rotate about an axle fixed to the center of the rod at an angle θ as shown in the figure. The center of the rod is at the origin of the coordinates, the axle along the z-axis, and the dumbbell lies in the x−y plane at t=0. The angular velocity ω is a constant in time and is directed along the z axis.
- Calculate all elements of the inertia tensor. Be sure to specify the coordinate system used.
- Using the calculated inertia tensor find the angular momentum of the dumbbell in the laboratory frame as a function of time.
- Using the equation L=r×p, calculate the angular momentum and show that it it is equal to the answer of part (b).
- Calculate the torque on the axle as a function of time.
- Calculate the kinetic energy of the dumbbell.
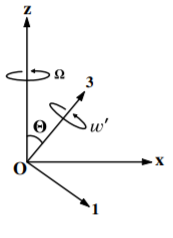
5. A heavy symmetric top has a mass m with the center of mass a distance h from the fixed point about which it spins and I1=I2≠I3. The top is precessing at a steady angular velocity Ω about the vertical space-fixed z axis. What is the minimum spin ω′ about the body-fixed symmetry axis, that is, the 3 axis assuming that the 3 axis is inclined at an angle θ=θ with respect to the vertical z axis. Solve the problem at the instant when the z,x,3,1 axes all are in the same plane as shown in the figure.
6. Consider an object with the center of mass is at the origin and inertia tensor, I=I(1/2−1/20−1/21/20001)
- Determine the principal moments of inertia and the principal axes. Guess the object.
- Determine the rotation matrix R and compute R†IR. Do the diagonal elements match with your results from (a)? Note: columns of R are eigenvectors of I.
- Assume ω=ω√2(ˆx+ˆz). Determine L in the rotating coordinate system. Are L and ω in the same direction? What does this mean?
- Repeat (c) for ω=ω√2(ˆx−ˆy). What is different and why?
- For which case will there be a non-zero torque required?
- Determine the rotational kinetic energy for the case ω=ω√2(ˆx−ˆy)?
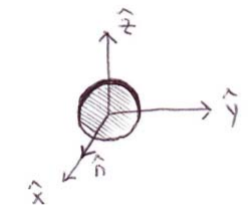
7. Consider a wheel (solid disk) of mass m and radius r. The wheel is subject to angular velocities ωA=ωAˆn where ˆn is normal to the surface and ωB=ωBˆz.
- Choose a set of principal axes by observation.
- Determine the angular velocities and angular momentum along the principal axes. Note: I1=12mr2 and I2=I3=14mr2.
- Determine the torque.
- Determine the rotation matrix that rotates the fixed coordinate system to the body coordinate system.
8. Determine the principal moments of inertia of an ellipsoid given by the equation, x2a2+y2b2+z2c2=1.
9. Determine the principal moments of inertia of a sphere of radius R with a cavity of radius r located ϵ from the center of the sphere.
10. Three equal masses m form the vertices of an equilateral triangle of side length L. Assume that the masses are located at (0,0,L√3), (0,L2,−L2√3), and (0,−L2,−L2√3), such that the center-of-mass is located at the origin.
- Determine the principal moments of inertia and principal axes.
Now consider the same system rotated 45∘ about the ˆz-axis. Assume that the masses are located at (0,0,L√3), (−L2√2,L2√2,−L2√3), and (L2√2,−L2√2,−L2√3), respectively.
- Determine the principal moments of inertia and principal axes.
- Could you have answered (b) without explicitly determining the inertia tensor? How?
11. Calculate the moments of inertia I1,I2,I3 for a homogeneous cone of mass M whose height is h and whose base has a radius R. Choose the x3-axis along the symmetry axis of the cone.
- Choose the origin at the apex of the cone, and calculate the elements of the inertia tensor.
- Make a transformation such that the center of mass of the cone is the origin and find the principal moments of inertia.
12. Four masses, all of mass m, lie in the x−y plane at positions (x,y)=(a,0),(−a,0),(0,+2a),(0,−2a). These are joined by massless rods to form a rigid body
- Find the inertial tensor, using the x,y,z axes as a reference system. Exhibit the tensor as a matrix.
- Consider a direction given by the unit vector ˆn that lies equally between the positive x,y,z axes; that is it makes equal angles with these three directions. Find the moment of inertia for rotation about this ˆn axis.
- Given that at a certain time t the angular velocity vector lies along the above direction ˆn, find, for that instant, the angle between the angular momentum vector and ˆn.
13. A homogeneous cube, each edge of which has a length l, initially is in a position of unstable equilibrium with one edge of the cube in contact with a horizontal plane. The cube then is given a small displacement causing it to tip over and fall. Show that the angular velocity of the cube when one face strikes the plane is given by ω2=Agl(√2−1)
14. A symmetric body moves without the influence of forces or torques. Let x3 be the symmetry axis of the body and L be along x′3. The angle between ω and x3 is α. Let ω and L initially be in the x2−x3 plane. What is the angular velocity of the symmetry axis about L in terms of I1, I3, ω, and α?
15. Consider a thin rectangular plate with dimensions a by b and mass M. Determine the torque necessary to rotate the thin plate with angular velocity ω about a diagonal. Explain the physical behavior for the case when a=b.