
14.2: Two Coupled Linear Oscillators




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
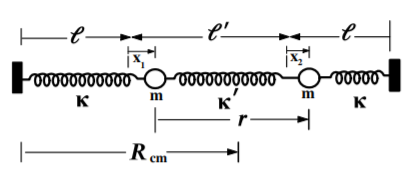
Consider the two-coupled linear oscillator, shown in Figure 14.2.1, which comprises two identical masses each connected to fixed locations by identical springs having a force constant κ. A spring with force constant κ′ couples the two oscillators. The equilibrium lengths of the outer two springs are l while that of the coupling spring is l′. The problem is simplified by restricting the motion to be along the line connecting the masses and assuming fixed endpoints. The small displacements of m1 and m2 are taken to be x1 and x2 with respect to the equilibrium positions l and l+l′ respectively. The restoring force on m1 is −κx1−κ′(x1−x2) while the restoring force on m2 is −κx2−κ′(x2−x1). This coupled double-oscillator system exhibits basic features of coupled linear oscillator systems.
Assuming m1=m2=m, then the equations of motion are
m¨x1+(κ+κ′)x1−κ′x2=0m¨x2+(κ+κ′)x2−κ′x1=0
Assume that the motion for these coupled equations is oscillatory with a solution of the form
x1=B1eiωtx2=B2eiωt
where the constants B may be complex to take into account both the magnitude and phase. Substituting these possible solutions into the equations of motion gives
−mω2B1eiωt+(κ+κ′)B1eiωt−κ′B2eiωt=0−mω2B2eiωt+(κ+κ′)B2eiωt−κ′B1eiωt=0
Collecting terms, and cancelling the common exponential factor, gives
(κ+κ′−mω2)B1−κ′B2=0(κ+κ′−mω2)B2−κ′B1=0
The existence of a non-trivial solution of these two simultaneous equations requires that the determinant of the coefficients of B1 and B2 must vanish, that is
|κ+κ′−mω2−κ′−κ′κ+κ′−mω2|=0
The expansion of this secular determinant yields
(κ+κ′−mω2)2−κ′2=0
Solving for ω gives
ω=√κ+κ′±κ′m
That is, there are two characteristic frequencies (or eigenfrequencies) for the system
ω1=√κ+2κ′m
ω2=√κm
Since superposition applies for these linear equations, then the general solution can be written as a sum of the terms that account for the two possible values of ω.

Figure 14.2.2: Displacement of each of two coupled linear harmonic oscillators with κ=4 and κ′=1 in relative units.
Figure 14.2.2 shows the solutions for a case where κ=4 and κ′=1, in arbitrary units, with the initial condition that x2=D, and x1=˙x1=˙x2=0. The two characteristic frequencies are ω1=√6m and ω2=√4m. The characteristic beats phenomenon is exhibited where the envelope over one complete cycle of the low frequency encompasses several higher frequency oscillations. That is, the solution is
x2(t)=D4[eiω1t+e−iω1t+eiω2t+e−iω2t]=Dcos[(ω1+ω22)t]cos[(ω1−ω22)t]
while
x1(t)=D4[eiω1t+e−iω1t−eiω2t−e−iω2t]=Dsin[(ω1+ω22)t]sin[(ω1−ω22)t]
The energy in the two-coupled oscillators flows back and forth between the coupled oscillators as illustrated in Figure 14.2.2.
A better understanding of the energy flow occurring between the two coupled oscillators is given by using a (x1,x2) configuration-space plot, shown in Figure 14.3.1. The flow of energy occurring between the two coupled oscillators can be represented by choosing normal-mode coordinates η1 and η2 that are rotated by 45∘ with respect to the spatial coordinates (x1,x2). These normal-mode coordinates (η1,η2) correspond to the two normal modes of the coupled double-oscillator system.