14.E: Coupled linear oscillators (Exercises)





( \newcommand{\kernel}{\mathrm{null}\,}\)
1. Two particles, each with mass m, move in one dimension in a region near a local minimum of the potential energy where the potential energy is approximately given by U=12k(7x21+4x22+4x1x2) where k is a constant.
- Determine the frequencies of oscillation.
- Determine the normal coordinates.
2. What is degeneracy? When does it arise?
3. The Lagrangian of three coupled oscillators is given by: 3∑n=1[m˙x2n2−kx2n2]+k′(x1x2+x2x3). Find x2(t) for the following initial conditions (at t=0): (x1,x2,x3)=(x0,0,0),::(˙x1,˙x2,˙x3)=(0,0,v0).
4. A mechanical analog of the benzene molecule comprises a discrete lattice chain of 6 point masses M connected in a plane hexagonal ring by 6 identical springs each with spring constant κ and length d.
- List the wave numbers of the allowed undamped longitudinal standing waves.
- Calculate the phase velocity and group velocity for longitudinal travelling waves on the ring.
- Determine the time dependence of a longitudinal standing wave for a angular frequency ω=2ωcutoff, that is, twice the cut-off frequency.
5. Consider a one dimensional, two-mass, three-spring system governed by the matrix A, A=(4−2−27) such that Ax=ω2x,
- Determine the eigenfrequencies and normal coordinates.
- Choose a set of initial conditions such that the system oscillates at its highest eigenfrequency.
- Determine the solutions x1(t) and x2(t).
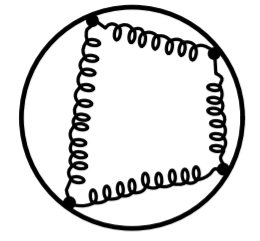
6. Four identical masses m are connected by four identical springs, spring constant κ, and constrained to move on a frictionless circle of radius b as shown on the left in the figure.
- How many normal modes of small oscillation are there?
- What are the eigenfrequencies of the small oscillations?
- Describe the motion of the four masses for each eigenfrequency.
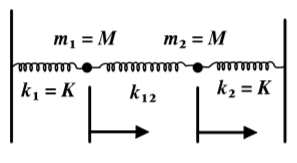
7. Consider the two identical coupled oscillators given on the right in the figure assuming κ1=κ2=κ. Let both oscillators be linearly damped with a damping constant β. A force F=F0cos(ωt) is applied to mass m1. Write down the pair of coupled differential equations that describe the motion. Obtain a solution by expressing the differential equations in terms of the normal coordinates. Show that the normal coordinates η1 and η2 exhibit resonance peaks at the characteristic frequencies ω1 and ω2 respectively.
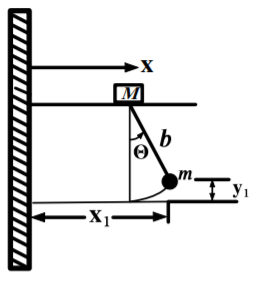
8. As shown on the left below the mass M moves horizontally along a frictionless rail. A pendulum is hung from M with a weightless rod of length b with a mass m at its end.
- Prove that the eigenfrequencies are ω1=0ω2=√gMb(M+m)
- Describe the normal modes.