
14.2: Complex Numbers and Sinusoidal Representation




- Last updated
- Jun 7, 2025
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Most linear systems that store energy exhibit frequency dependence and therefore are more easily characterized by their response to sinusoids rather than to arbitrary waveforms. The resulting system equations contain many instances of Acos(ωt+ϕ), where A, ω, and ϕ are the amplitude, frequency, and phase of the sinusoid, respectively. Acos(ωt+ϕ) can be replaced by A_ using complex notation, indicated here by the underbar and reviewed below; it utilizes the arbitrary definition:
j≡(−1)0.5
This arbitrary non-physical definition is exploited by De Moivre’s theorem (B.4), which utilizes a unique property of e = 2.71828:
eϕ=1+ϕ+ϕ2/2!+ϕ3/3!+…
Therefore:
ejϕ=1+jϕ−ϕ2/2!−jϕ3/3!+ϕ4/4!+jϕ5/5!−…=[1−ϕ2/2!+ϕ4/4!−…]+[jϕ−jϕ3/3!+jϕ5/5!…]
ejϕ=cosϕ+jsinϕ
This is a special instance of a general complex number A_:
A_=Ar+jAi
where the real part is Ar≡Re{A_} and the imaginary part is Ai≡Im{A_}.
It is now easy to use (B.4) and (B.5) to show that76:
Acos(ωt+ϕ)=Re{Aej(ωt+ϕ)}=Re{Aejϕejωt}=Re{Aejωt}=Arcosωt−Aisinωt
where:
A_=Aejϕ=Acosϕ+jAsinϕ=Ar+jAi
Ar≡Acosϕ,Ai≡Asinϕ
76 The physics community differs and commonly defines Acos(ωt+ϕ)=Re{Ae−j(ωt+ϕ)} and Ai≡−Asinϕ, where the rotational direction of ϕ is reversed in Figure 14.2.1. Because phase is reversed in this alternative notation, the impedance of an inductor L becomes -jωL, and that of a capacitor becomes j/ωC. In this notation j is commonly replaced by -i.
The definition of A_ given in (B.8) has the useful geometric interpretation shown in Figure 14.2.1(a), where the magnitude of the phasor A_ is simply the given amplitude A of the sinusoid, and the angle ϕ is its phase.
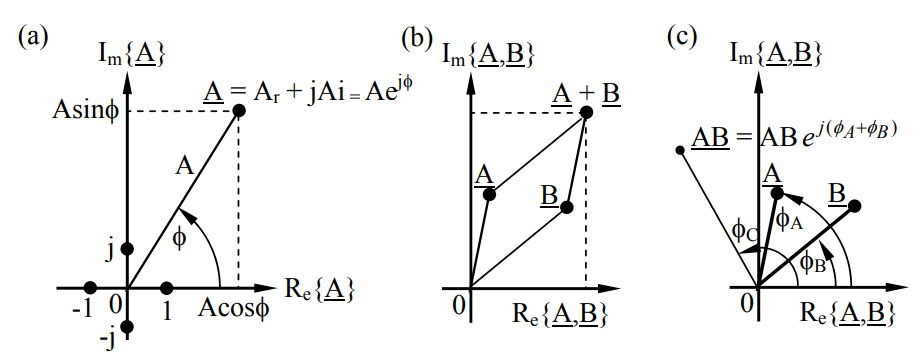
When ϕ = 0 we have Re{A_ejωt}=Acosωt, and when ϕ = π/2 we have -Asinωt. Advances in time alter the phasor A_ in the same sense as advances in ϕ; the phasor rotates counterclockwise. The utility of this diagram is partly that the signal of interest, Re{A_ejωt}, is simply the projection of the phasor A_ejωt on the real axis. It also makes clear that:
A=(A2r+A2i)0.5
ϕ=tan−1(Ai/Ar)
It is also easy to see, for example, that ejπ=−1, and that A_=jA corresponds to -Asinωt.
Examples of equivalent representations in the time and complex domains are:
Acosωt↔A−Asinωt↔jAAcos(ωt+ϕ)↔AejϕAsin(ωt+ϕ)↔−jAejϕ=Aej(ϕ−π/2)
Complex numbers behave as vectors in some respects, where addition and multiplication are also illustrated in Figure 14.2.1(b) and (c), respectively:
A_+B_=B_+A_=Ar+Br+j(Ai+Bi)
AB_=BA_=(ArBr−AiBi)+j(ArBi+AiBr)=ABej(ϕA+ϕB)
A_∗=Ar−jAi=Ae−jϕA
We can easily solve for the real and imaginary parts of A_:
Ar=(A_+A_∗)/2,Ai=(A_−A_∗)/2
Ratios of complex numbers can also be readily computed:
A_/B_=(A_/B_)ej(ϕA−ϕB)=A_B_∗/BB_∗=AB_∗/|B_|2
Even an nth root of A_=Aejϕ can be simply found:
A_1/n=A1/nejϕ/n
where n legitimate roots exist and are:
A_1/n=A(1/n)e(jϕ/n)e(j2πm/n)
for m = 0, 1, …, n – 1.