
4.6: Trajectories in the Complex Plane



- Last updated
- Apr 30, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
If we have a function z(t) which takes a real input t and outputs a complex number z, it is often useful to plot a curve in the complex plane called the “parametric trajectory” of z. Each point on this curve indicates the value of z for a particular value of t. We will give a few examples below.
First, consider z(t)=eiωt,ω∈R.

To see why, observe that the function has the form z(t)=r(t)eiθ(t), which has magnitude r(t)=1, and argument θ(t)=ωt varying proportionally with t. If ω is positive, the argument increases with t, so the trajectory is counter-clockwise. If ω is negative, the trajectory is clockwise.
Next, consider z(t)=e(γ+iω)t,

To see this, we again observe that this function can be written in the form z(t)=r(t)eiθ(t),
Finally, consider z(t)=1αt+β,α,β∈C.
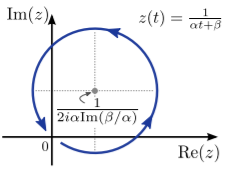
Showing this requires a bit of ingenuity, and is left as an exercise. This is an example of something called a Möbius transformation.