
4.2: Collective Models
- Page ID
- 15018

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Another, and actually older, way to look at nuclei is as a drop of “quantum fluid”. This ignores the fact that a nucleus is made up of protons and neutrons, and explains the structure of nuclei in terms of a continuous system, just as we normally ignore the individual particles that make up a fluid.
Liquid Drop Model and Associated Mass Formula
Now we have some basic information about the liquid drop model, let us try to reinterpret the mass formula in terms of this model; especially as those of a spherical drop of liquid. As a prime example consider the Coulomb energy. The general energy associated with a charge distribution is
\[E_{\text{Coulomb}}=\dfrac{1}{2} \int \frac{\rho(r_1)\rho(r_2)}{4\pi \epsilon_0 r_{12}} d^3r_1d^3r_2, \nonumber \]
where the charge distribution is the smeared out charge of the protons,
\[4\pi \int_0^R \rho(r) r^2 dr = Ze \nonumber \]
If we take the charge to be homogeneously distributed density in a sphere
\[\rho=\dfrac{Ze}{4/3\pi R^3}, \nonumber \]
then
\[\begin{align} E_{\text{Coulomb}} &= \frac{(2\pi)(4\pi)}{4\pi \epsilon_0} \rho^2 \int_0^R \int_{-1}^{1} \frac{r_1^2\,dr_1\,d\cos\theta\,r_2^2\,dr_2} {\left(r_1^2+r_2^2-2r_1r_2 \cos\theta\right)^{1/2}}\nonumber\\[5pt] &=\frac{\pi \rho^2}{2\epsilon_0} \int_0^R \int_0^R \frac{(r_1+r_2)-|r_1-r_2|}{r_1 r_2} r_1^2dr_1\,r_2^2dr_2 \nonumber \\[5pt] &= \frac{\pi \rho^2}{2\epsilon_0} \left[ 2 \int_0^R x^2dx \int_0^R y dy-\int_0^R\int_0^R | r_1-r_2| r_1 r_2 dr_1\,dr_2 \right] \nonumber\\[5pt] &= \frac{\pi \rho^2}{2\epsilon_0} \left(\frac{R^5}{3} - {R^5}{15}\right) \nonumber\\[5pt] &= \frac{\pi Z^2 9 e^2}{(4\pi)^2 R^6 2\epsilon_0} \frac{4 R^5}{15} = \frac{ e^2}{4 \pi \epsilon_0} \frac{3}{10} \frac{Z^2}{R} .\end{align} \nonumber \]
Equilibrium Shape & Deformation
Once we picture a nucleus as a fluid, we can ask question about its equilibrium shape. From experimental data we know that near closed shells nuclei are spherical, i.e., the equilibrium shape is a sphere. When both the proton and neutron number differ appreciably from the magic numbers, the ground state is often found to be axially deformed, either prolate (cigar like) or oblate (like a pancake).
A useful analysis to perform is to see what happens when we deform a nucleus slightly, turning it into an ellipsoid, with one axis slightly longer than the others, keeping a constant volume:
\[a= R(1+\epsilon),\qquad b= R(1+\epsilon)^{-1/2}. \nonumber \]
The volume is \(\frac{4}{3} \pi a b^2\), and is indeed constant. The surface area of an ellipsoid is more complicated, and we find
\[S = 2\pi \left[ b^2+ab\frac{\arcsin e }{e} \right], \nonumber \]
where the eccentricity \(e\) is defined as
\[e = \left[1-b^2/a^2\right]^{1/2}. \nonumber \]
(For a review of eccentricity in 2D ellipses, check here). For small deformation \(\epsilon\) we find a much simpler result,
\[S = 4\pi R^2 \left[1+\frac{2}{5} \epsilon ^2\right], \nonumber \]
and the surface area thus increases for both elongations and contractions. Thus the surface energy increases by the same factor. There is one competing term, however, since the Coulomb energy also changes, the Coulomb energy goes down, since the particles are further apart,
\[E_{\text{Coulomb}} \rightarrow E_{\text{Coulomb}} \left(1-\frac{\epsilon^2}{5} \right) \nonumber \] We thus find a change in energy of
\[\Delta E = \epsilon^2 \left[\frac{2}{5} \beta A^{2/3} -\frac{1}{5} \epsilon Z^2 A^{-1/3}\right] \nonumber \]
The spherical shape is stable if \(\Delta E>0\).
Since it is found that the nuclear fluid is to very good approximation incompressible, the dynamical excitations are those where the shape of the nucleus fluctuates, keeping the volume constant, as well as those where the nucleus rotates without changing its intrinsic shape.
Collective Vibrations
Let us first look at collective vibrations, and for simplicity only at those of a spherical fluid drop. We can think of a large number of shapes; a complete set can be found by parametrising the surface as
\[r=\sum _{L,M}a_{LM}Y_{LM}(\theta ,\phi ) \nonumber \]
where \(Y_{LM}\) are the spherical harmonics and describe the multipolarity (angular momentum) of the surface. A few examples are shown in Figures \(\PageIndex{1}\)-\(\PageIndex{4}\), where we sketch the effects of monopole (\(L=0\)), dipole (\(L=1\)), quadrupole (\(L=2\)) and octupole (\(L=3\)) modes. Let us investigate these modes in turn, in the harmonic limit, where we look at small vibrations (small \(a_{LM}\)) only.
Monopole
The monopole mode (Figure \(\PageIndex{1}\)), is the one where the size of the nuclear fluid oscillates, i.e., where the nucleus gets compressed. Experimentally one finds that the lowest excitation of this type, which in even-even nuclei carries the quantum number \(J^{\pi }=0^{+}\), occurs at an energy of roughly
\[E_{0}\approx 80A^{-1/3} \, \text {MeV} \nonumber \]
above the ground state. Compared to ordinary nuclear modes, which have energies of a few MeV, these are indeed high energy modes (\(15\text { MeV}\) for \(A=216\)), showing the incompressibility of the nuclear fluid.

Dipole
The dipole mode (Figure \(\PageIndex{2}\)) by itself is not very interesting: it corresponds to an overall translation of the centre of the nuclear fluid. One can, however, imagine a two-fluid model where a proton and neutron fluid oscillate against each other. This is a collective isovector (\(I=1\)) mode. It has quantum numbers \(J^{\pi }=1^{-}\), occurs at an energy of roughly
\[E_{0}\approx 77A^{-1/3} \,\text {MeV} \nonumber \]
above the ground state, close to the monopole resonance. It shows that the neutron and proton fluids stick together quite strongly, and are hard to separate.

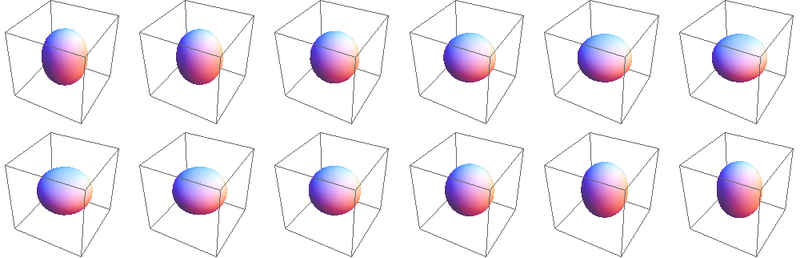
Quadrupole
Quadrupole modes (Figure \(\PageIndex{3}\)), are the dominant vibrational feature in almost all nuclei. The very special properties of the lower multipolarities mean that these are the first modes available for low-energy excitations in nuclei. In almost all even-even nuclei we find a low-lying state (at excitation energy of less than \(1-2\text {MeV}\)), which carries the quantum numbers \(J^{\pi }=2^{+}\), and near closed shells we can often distinguish the second harmonic states as well (three states with quantum numbers \(J^{\pi }=0^{+},2^{+},4^{+}\)) .
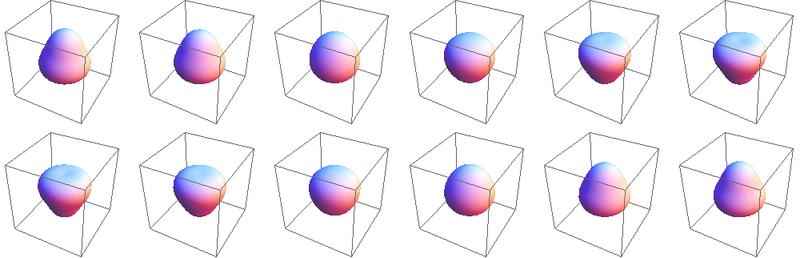
Octupole
Octupole modes, with \(J^{\pi }=3^{-}\), see Figure \(\PageIndex{4}\), can be seen in many nuclei. In nuclei where shell-structure makes quadrupole modes occur at very high energies, such as doubly magic nuclei, the octupole state is often the lowest excited state.
Collective Rotations
Once we have created a nucleus with axial deformation, i.e., a nucleus with ellipsoidal shape, but still axial symmetry about one axis, we can rotate the fluid around one of the non-symmetry axes to generate excitations (Figure \(\PageIndex{5}\)). We cannot do it around a symmetry axis, since the resulting state would just be the same quantum state as we started with, and therefore the energy cannot change. A rotated state around a non-symmetry axis is a different quantum state, and therefore we can overlay many of these states, especially with constant rotational velocity. This is almost like the rotation of a dumbbell, and we can predict the classical spectrum to be of the form
\[H=\dfrac{1}{2\mathcal {I}}{\vec{J}}^{2}, \nonumber \]
where \({\vec{J}}\) is the classical angular momentum and \(\mathcal{I}\) is the moment of inertia for that motion. We predict a quantum mechanical spectrum of the form
\[E_{\mathrm {rot}}(J)=\dfrac{\hbar^{2}}{2\mathcal {I}}J(J+1), \nonumber \]
where \(J\) is now the angular momentum quantum number. Naively we expect the spectrum to be more compressed (the moment of inertial is larger) the more elongated the nucleus becomes. It is known that certain structures in nuclei indeed describe well deformed nuclei, up to super and hyper deformed (axis ratio from \(1:1.2\) to \(1:2\)).
