3.4: Remarks on Ergodic Theory




- Last updated
- May 25, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand\Dalpha
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[1], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dbeta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[2], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dgamma
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[3], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Ddelta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[4], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Depsilon
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[5], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dvarepsilon
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[6], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dzeta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[7], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Deta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[8], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dtheta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[9], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dvartheta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[10], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Diota
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[11], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dkappa
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[12], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dlambda
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[13], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Dvarpi
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[14], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\DGamma
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[15], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\DDelta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[16], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\DTheta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[17], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vmu
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[18], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vnu
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[19], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vxi
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[20], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vom
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[21], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vpi
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[22], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vvarpi
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[23], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vrho
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[24], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vvarrho
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[25], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vsigma
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[26], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vvarsigma
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[27], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vtau
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[28], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vupsilon
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[29], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vphi
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[30], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vvarphi
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[31], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vchi
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[32], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vpsi
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[33], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\Vomega
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[34], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\VGamma
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[35], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\VDelta
Callstack:
at (Template:MathJaxArovas), /content/body/div/p[1]/span[36], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\newcommand\BI{\mib I}}
\)
\newcommand { M}
\newcommand { m}
}
\( \newcommand\tcb{\textcolor{blue}\)
\( \newcommand\tcr{\textcolor{red}\)
1$#1_$
\newcommand\SZ{\textsf Z}} \( \newcommand\kFd{k\ns_{\RF\dar}\)
\newcommand\mutB{\tilde\mu}\ns_\ssr{B}
\( \newcommand\xhihOZ
Callstack:
at (Template:MathJaxArovas), /content/body/div/span[1], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
\( \newcommand\labar
Callstack:
at (Template:MathJaxArovas), /content/body/div/span[2], line 1, column 1
at template()
at (Bookshelves/Thermodynamics_and_Statistical_Mechanics/Book:_Thermodynamics_and_Statistical_Mechanics_(Arovas)/03:_Ergodicity_and_the_Approach_to_Equilibrium/3.04:_Remarks_on_Ergodic_Theory), /content/body/p/span, line 1, column 23
Definition of Ergodicity
A mechanical system evolves according to Hamilton’s equations of motion. We have seen how such a system is recurrent in the sense of Poincaré.
There is a level beyond recurrence called ergodicity. In an ergodic system, time averages over intervals [0,T] with T\to\infty may be replaced by phase space averages. The time average of a function f(\Bvphi) is defined as
\big\langle f(\Bvphi)\big\rangle\ns_t=\lim_{T\to\infty}{1\over T}\!\int\limits_0^T\!\!dt\,f\big(\Bvphi(t)\big)\ .
For a Hamiltonian system, the phase space average of the same function is defined by
\big\langle f(\Bvphi)\big\rangle\ns_S=\int\!\!d\mu\,f(\Bvphi)\,\delta\big(E-H(\Bvphi)\big) \bigg/ \!\int\!\!d\mu\,\delta\big(E-H(\Bvphi)\big) \ ,
where H(\Bvphi)=H(\Bq,\Bp) is the Hamiltonian, and where \delta(x) is the Dirac \delta-function. Thus,
{ ergodicity}\quad\Longleftrightarrow\quad \big\langle f(\Bvphi)\big\rangle\ns_t=\big\langle f(\Bvphi)\big\rangle\ns_S\ ,
for all smooth functions f(\Bvphi) for which \big\langle f(\Bvphi)\big\rangle\ns_S exists and is finite. Note that we do not average over all of phase space. Rather, we average only over a hypersurface along which H(\Bvphi)=E is fixed, over one of the level sets of the Hamiltonian function. This is because the dynamics preserves the energy. Ergodicity means that almost all points \Bvphi will, upon Hamiltonian evolution, move in such a way as to eventually pass through every finite neighborhood on the energy surface, and will spend equal time in equal regions of phase space.
Let \xhi\ns_\CR(\Bvphi) be the characteristic function of a region \CR:
\xhi\ns_\CR(\Bvphi)=\begin{cases} 1 & { if}\ \Bvphi\in \CR\\ 0 & { otherwise,}\end{cases}
where H(\Bvphi)=E for all \Bvphi\in\CR. Then
\big\langle \xhi\ns_\CR(\Bvphi)\big\rangle\ns_t=\lim_{T\to\infty} \bigg({\hbox{ time spent in}\ \CR\over T}\bigg)\ .
If the system is ergodic, then
\big\langle \xhi\ns_\CR(\Bvphi)\big\rangle\ns_t=P(\CR)= { D\ns_\CR(E)\over D(E)}\ ,
where P(\CR) is the a priori probability to find \Bvphi\in\CR, based solely on the relative volumes of \CR and of the entire phase space. The latter is given by
D(E)=\int\!\!d\mu\>\delta\big(E-H(\Bvphi)\big)\ ,
called the density of states, is the surface area of phase space at energy E, and
D\ns_\CR(E)=\int\limits_\CR\!\!d\mu\,\delta\big(E-H(\Bvphi)\big)\ .
is the density of states for the phase space subset \CR. Note that
\begin{aligned} D(E)&\equiv\int\!\!d\mu\>\delta\big(E-H(\Bvphi)\big) =\int\limits\ns_{\CS\ns_E} \!\!\!{dS\over |\bnabla\! H|}\\ &={d\over dE}\int\!\!d\mu\>\RTheta\big(E-H(\Bvphi)\big)={d\ROmega(E)\over dE}\ .\end{aligned}
Here, dS is the differential surface element, \CS\ns_E is the constant H hypersurface H(\Bvphi)=E, and \ROmega(E) is the volume of phase space over which H(\Bvphi)<E. Note also that we may write
d\mu=dE\,d\Sigma\ns_E\ ,
where
d\Sigma\ns_E={dS\over |\bnabla\! H|}\bigg|\nd_{H(\Bvphi)=E}
is the the invariant surface element.
The Microcanonical Ensemble
The distribution,
\vrh\ns_E(\Bvphi)={\delta\big(E-H(\Bvphi)\big) \over D(E)}={\delta\big(E-H(\Bvphi)\big) \over \int\!d\mu\, \delta\big(E-H(\Bvphi)\big) }\ ,
defines the microcanonical ensemble (\muCE) of Gibbs.
We could also write
\big\langle f(\Bvphi)\big\rangle\ns_S={1\over D(E)}\int\limits_{\CS\ns_E}\! d\Sigma\ns_E\,f(\Bvphi)\ ,
integrating over the hypersurface \CS\ns_E rather than the entire phase space.

Ergodicity and Mixing
Just because a system is ergodic, it does not necessarily mean that \vrh(\vphi,t)\to\vrh^{ eq}(\Bvphi), for consider the following motion on the toroidal space \big(\Bvphi=(q,p)\,\big|\, 0\le q< 1 \ ,\ 0\le p < 1\big\}, where we identify opposite edges, we impose periodic boundary conditions. We also take q and p to be dimensionless, for simplicity of notation. Let the dynamics be given by
{\dot q}=1 \qquad,\qquad {\dot p}=\alpha\ .
The solution is
q(t)=q\ns_0+t\qquad,\qquad p(t)=p\ns_0+\alpha t\ ,
hence the phase curves are given by
p=p\ns_0+\alpha(q-q\ns_0)\ .
Now consider the average of some function f(q,p). We can write f(q,p) in terms of its Fourier transform,
f(q,p)=\sum_{m,n}{\hat f}\ns_{mn}\,e^{2\pi i(mq+np)}\ .
We have, then,
f\big(q(t),p(t)\big)=\sum_{m,n}{\hat f}\ns_{mn}\,e^{2\pi i(mq\ns_0+np\ns_0)}\,e^{2\pi i(m+\alpha n)t}\ .
We can now perform the time average of f:
\begin{split} \big\langle f(q,p)\big\rangle\ns_t&={\hat f}\ns_{00}+\lim_{T\to\infty}\ {1\over T}\ {\sum_{m,n}}'\,{\Hf}\ns_{mn}\, e^{2\pi i(mq\ns_0+np\ns_0)}\,{e^{2\pi i(m+\alpha n)T}-1\over 2\pi i (m+\alpha n)}\\ &={\hat f}\ns_{00} \quad\hbox{ if $\alpha$ irrational.} \end{split}
Clearly,
\big\langle f(q,p)\big\rangle\ns_S=\int\limits_0^1\!\!dq\!\int\limits_0^1\!\!dp\,f(q,p)={\hat f}\ns_{00}=\big\langle f(q,p)\big\rangle\ns_t\ ,
so the system is ergodic.
The situation is depicted in Figure \PageIndex{1}. If we start with the characteristic function of a disc,
\vrh(q,p,t=0)=\RTheta\big(a^2-(q-q\ns_0)^2-(p-p\ns_0)^2\big)\ ,
then it remains the characteristic function of a disc:
\vrh(q,p,t)=\RTheta\big(a^2-(q-q\ns_0-t)^2-(p-p\ns_0-\alpha t)^2\big)\ ,
For an example of a transition to ergodicity in a simple dynamical Hamiltonian model, see §9.
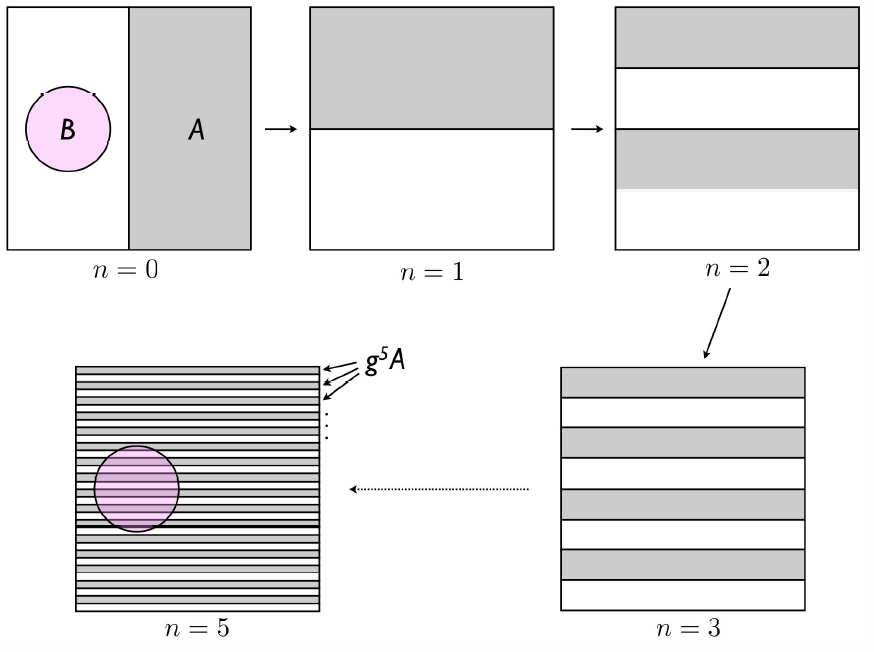
A stronger condition one could impose is the following. Let A and B be subsets of \CS\ns_E. Define the measure
\nu(A)=\int\!\!d\Sigma\ns_E\>\xhi\ns_A(\Bvphi)\bigg/\!\!\int\!d\Sigma\ns_E={D\ns_A(E)\over D(E)}\ ,
where \xhi\ns_A(\Bvphi) is the characteristic function of A. The measure of a set A is the fraction of the energy surface \CS\ns_E covered by A. This means \nu(\CS\ns_E)=1, since \CS\ns_E is the entire phase space at energy E. Now let g be a volume-preserving map on phase space. Given two measurable sets A and B, we say that a system is mixing if
{ mixing} \qquad\Longleftrightarrow\qquad \lim_{n\to\infty}\nu\Big(g^n \! A\cap B\Big)= \nu(A)\,\nu(B)\ .
In other words, the fraction of B covered by the n^{\ssr{th}} iterate of A, g^n \!A, is, as n\to\infty, simply the fraction of \CS\ns_E covered by A. The iterated map g^n distorts the region A so severely that it eventually spreads out ‘evenly’ over the entire energy hypersurface. Of course by ‘evenly’ we mean ‘with respect to any finite length scale’, because at the very smallest scales, the phase space density is still locally constant as one evolves with the dynamics.
Mixing means that
\begin{split} \big\langle f(\Bvphi)\big\rangle&=\int\!\!d\mu\,\vrh(\Bvphi,t)\,f(\Bvphi)\\ &\bmapright{t\to\infty} \>\int\!\!d\mu\,f(\Bvphi)\,\delta\big(E-H(\Bvphi)\big)\bigg/\!\!\int\!\!d\mu\,\delta\big(E-H(\Bvphi)\big)\bvph\\ &\equiv\Tra \!\Big[f(\Bvphi)\,\delta\big(E-H(\Bvphi)\big)\Big]\Big/\Tra \!\Big[\delta\big(E-H(\Bvphi)\big)\Big]\ . \end{split}
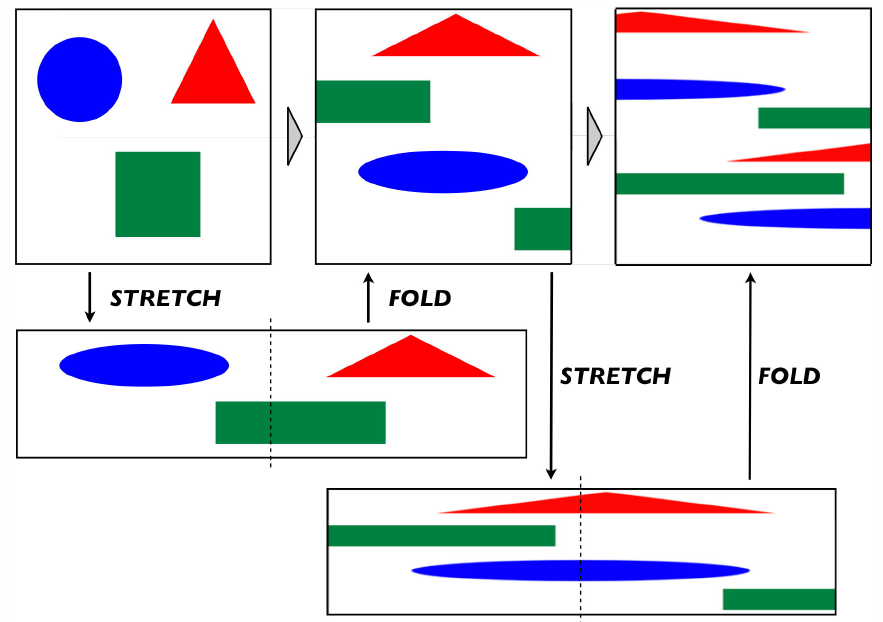
Physically, we can imagine regions of phase space being successively stretched and folded. During the stretching process, the volume is preserved, so the successive stretch and fold operations map phase space back onto itself.
An example of a mixing system is the baker’s transformation, depicted in Figure \PageIndex{2}. The baker map is defined by
g(q,p)=\begin{cases} \big(2q\,,\,{1\over 2}p\big) & { if}\quad 0\le q < {1\over 2} \\ &\\ \big(2q-1 \,,\, {1\over 2}p+{1\over 2}\big) & { if}\quad {1\over 2} \le q < 1\ . \end{cases}
Note that g is invertible and volume-preserving. The baker’s transformation consists of an initial stretch in which q is expanded by a factor of two and p is contracted by a factor of two, which preserves the total volume. The system is then mapped back onto the original area by cutting and restacking, which we can call a ‘fold’. The inverse transformation is accomplished by stretching first in the vertical (p) direction and squashing in the horizontal (q) direction, followed by a slicing and restacking. Explicitly,
g^{-1}(q,p)=\begin{cases} \big({1\over 2}q\,,\,2p\big) & { if}\quad 0\le p < {1\over 2} \\ &\\ \big({1\over 2}q + {1\over 2} \,,\, 2p-1 \big) & { if}\quad {1\over 2} \le p < 1\ . \end{cases}

Another example of a mixing system is Arnold’s ‘cat map’9
g(q,p)=\big(\,[q+p]\, , \, [q+2p]\,\big)\ ,
where [x] denotes the fractional part of x. One can write this in matrix form as
\begin{pmatrix} q' \\ p' \end{pmatrix} = \stackrel{M}{\overbrace{\begin{pmatrix} 1 & 1 \\ 1 & 2 \end{pmatrix}}} \begin{pmatrix} q \\ p \end{pmatrix} \ { mod}\ \MZ^2\ .
The matrix M is very special because it has integer entries and its determinant is { det}\,M=1. This means that the inverse also has integer entries. The inverse transformation is then
\begin{pmatrix} q \\ p \end{pmatrix} = \stackrel{M^{-1}}{\overbrace{\begin{pmatrix} 2 & -1 \\ -1 & 1 \end{pmatrix}}} \begin{pmatrix} q' \\ p' \end{pmatrix} \ { mod}\ \MZ^2\ .
Now for something cool. Suppose that our image consists of a set of discrete points located at (n\ns_1/k\,,\,n\ns_2/k), where the denominator k\in \MZ is fixed, and where n\ns_1 and n\ns_2 range over the set \{1,\ldots,k\}. Clearly g and its inverse preserve this set, since the entries of M and M^{-1} are integers. If there are two possibilities for each pixel (say off and on, or black and white), then there are 2^{(k^2)} possible images, and the cat map will map us invertibly from one image to another. Therefore it must exhibit Poincaré recurrence! This phenomenon is demonstrated vividly in Figure \PageIndex{4}, which shows a k=150 pixel (square) image of a cat subjected to the iterated cat map. The image is stretched and folded with each successive application of the cat map, but after 300 iterations the image is restored! How can this be if the cat map is mixing? The point is that only the discrete set of points (n\ns_1/k\,,\,n\ns_2/k) is periodic. Points with different denominators will exhibit a different periodicity, and points with irrational coordinates will in general never return to their exact initial conditions, although recurrence says they will come arbitrarily close, given enough iterations. The baker’s transformation is also different in this respect, since the denominator of the p coordinate is doubled upon each successive iteration.
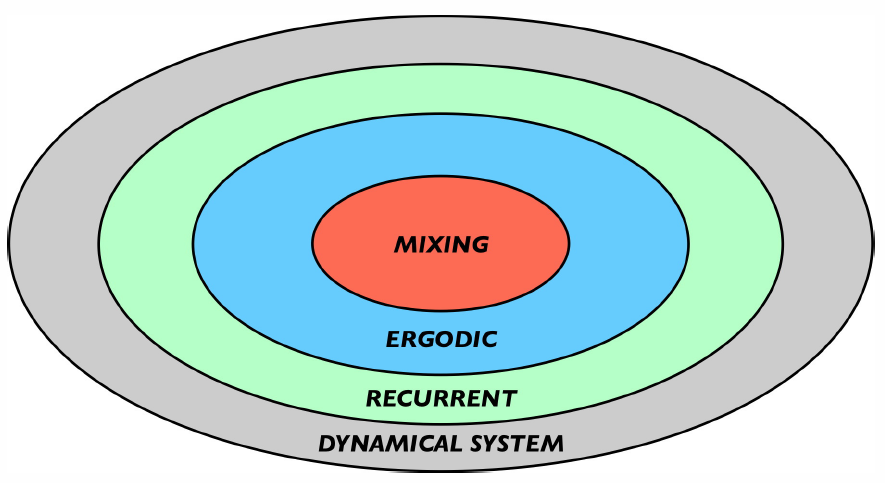
The student should now contemplate the hierarchy of dynamical systems depicted in Figure \PageIndex{5}, understanding the characteristic features of each successive refinement10.