
6.2: Circular Motion




- Last updated
- Nov 6, 2024
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
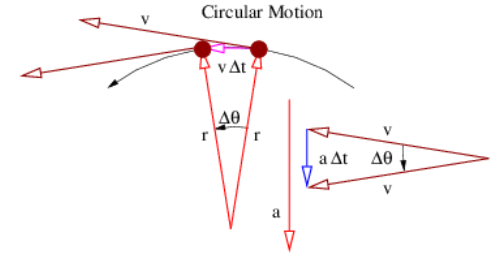
Imagine an object constrained by an attached string to move in a circle at constant speed, as shown in the left panel of Figure 6.2.2:. We now demonstrate that the acceleration of the object is toward the center of the circle. The acceleration in this special case is called the centripetal acceleration.

Figure 6.2.3: shows the position of the object at two times spaced by the time interval Δt. The position vector of the object relative to the center of the circle rotates through an angle Δθ during this interval, so the angular rate of revolution of the object about the center is ω=Δθ/Δt. The magnitude of the velocity of the object is v, so the object moves a distance vΔt during the time interval. To the extent that this distance is small compared to the radius r of the circle, the angle Δθ=vΔt/r. Solving for v and using ω=Δθ/Δt, we see that
v=ωr( circular motion ).
The direction of the velocity vector changes over this interval, even though the magnitude v stays the same. Figure 6.2.3: shows that this change in direction implies an acceleration a which is directed toward the center of the circle, as noted above. The magnitude of the vectoral change in velocity in the time interval Δ is aΔt . . Since the angle between the initial and final velocities is the same as the angle Δθ between the initial and final radius vectors, we see from the geometry of the triangle in Figure 6.2.3: that aΔt/v=Δθ. Solving for a results in
a=ωv( circular motion ).
Combining equations (???) and (???) yields the equation for centripetal acceleration:
a=ω2r=v2/r (centripetal acceleration).
The second form is obtained by eliminating ω from the first form using equation (???).