
16.7: Standing Waves and Resonance


- Last updated
- Mar 16, 2025
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
- Describe standing waves and explain how they are produced
- Describe the modes of a standing wave on a string
- Provide examples of standing waves beyond the waves on a string
Throughout this chapter, we have been studying traveling waves, or waves that transport energy from one place to another. Under certain conditions, waves can bounce back and forth through a particular region, effectively becoming stationary. These are called standing waves.
Another related effect is known as resonance. In Oscillations, we defined resonance as a phenomenon in which a small-amplitude driving force could produce large-amplitude motion. Think of a child on a swing, which can be modeled as a physical pendulum. Relatively small-amplitude pushes by a parent can produce large-amplitude swings. Sometimes this resonance is good—for example, when producing music with a stringed instrument. At other times, the effects can be devastating, such as the collapse of a building during an earthquake. In the case of standing waves, the relatively large amplitude standing waves are produced by the superposition of smaller amplitude component waves.
Standing Waves
Sometimes waves do not seem to move; rather, they just vibrate in place. You can see unmoving waves on the surface of a glass of milk in a refrigerator, for example. Vibrations from the refrigerator motor create waves on the milk that oscillate up and down but do not seem to move across the surface. Figure 16.7.1 shows an experiment you can try at home. Take a bowl of milk and place it on a common box fan. Vibrations from the fan will produce circular standing waves in the milk. The waves are visible in the photo due to the reflection from a lamp. These waves are formed by the superposition of two or more traveling waves, such as illustrated in Figure 16.7.2 for two identical waves moving in opposite directions. The waves move through each other with their disturbances adding as they go by. If the two waves have the same amplitude and wavelength, then they alternate between constructive and destructive interference. The resultant looks like a wave standing in place and, thus, is called a standing wave.

Consider two identical waves that move in opposite directions. The first wave has a wave function of y1(x, t) = A sin(kx − ωt) and the second wave has a wave function y2(x, t) = A sin(kx + ωt). The waves interfere and form a resultant wave
y(x,t)=y1(x,t)+y2(x,t),=Asin(kx−ωt)+Asin(kx+ωt).
This can be simplified using the trigonometric identity
sin(α±β)=sinαcosβ±cosαsinβ,
where α = kx and β = ωt, giving us
y(x,t)=A[sin(kx)cos(ωt)−cos(kx)sin(ωt)+sin(kx)cos(ωt)−cos(kx)sin(ωt)],
which simplifies to
y(x,t)=2Asin(kx)cos(ωt).
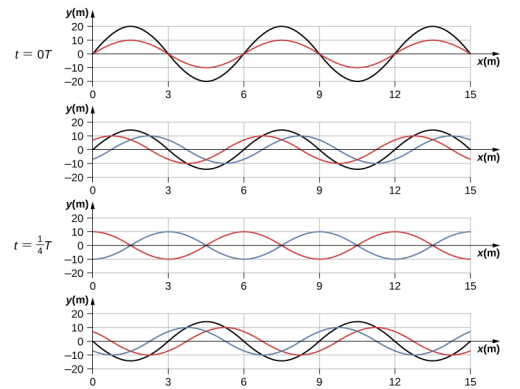
Notice that the resultant wave is a sine wave that is a function only of position, multiplied by a cosine function that is a function only of time. Graphs of y(x,t) as a function of x for various times are shown in Figure 16.7.6. The red wave moves in the negative x-direction, the blue wave moves in the positive x-direction, and the black wave is the sum of the two waves. As the red and blue waves move through each other, they move in and out of constructive interference and destructive interference.
Initially, at time t = 0, the two waves are in phase, and the result is a wave that is twice the amplitude of the individual waves. The waves are also in phase at the time t = T2. In fact, the waves are in phase at any integer multiple of half of a period:
t = nT2 where n = 0, 1, 2, 3.... (in phase).
At other times, the two waves are 180°(π radians) out of phase, and the resulting wave is equal to zero. This happens at
t = 14T, 34T, 54T,..., n4T where n = 1, 3, 5.... (out of phase).
Notice that some x-positions of the resultant wave are always zero no matter what the phase relationship is. These positions are called nodes. Where do the nodes occur? Consider the solution to the sum of the two waves
y(x,t)=2Asin(kx)cos(ωt).
Finding the positions where the sine function equals zero provides the positions of the nodes.
sin(kx)=0kx=0,π,2π,3π,…2πλx=0,π,2π,3π,…x=0,λ2,λ,3λ2,…=nλ2n=0,1,2,3,…
There are also positions where y oscillates between y = ±A. These are the antinodes. We can find them by considering which values of x result in sin(kx) = ±1.
sin(kx)=±1kx=π2,3π2,5π2,…2πλx=π2,3π2,5π2,…x=λ4,3λ4,5λ4,…=nλ4n=1,3,5,…
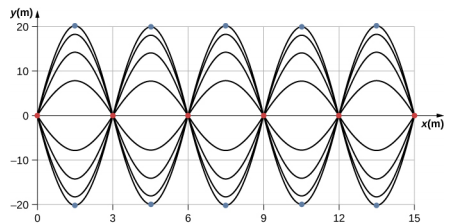
What results is a standing wave as shown in Figure 16.7.3, which shows snapshots of the resulting wave of two identical waves moving in opposite directions. The resulting wave appears to be a sine wave with nodes at integer multiples of half wavelengths. The antinodes oscillate between y = ±2A due to the cosine term, cos(ωt) , which oscillates between ±1.
The resultant wave appears to be standing still, with no apparent movement in the x-direction, although it is composed of one wave function moving in the positive, whereas the second wave is moving in the negative x-direction. Figure 16.7.3 shows various snapshots of the resulting wave. The nodes are marked with red dots while the antinodes are marked with blue dots.
A common example of standing waves are the waves produced by stringed musical instruments. When the string is plucked, pulses travel along the string in opposite directions. The ends of the strings are fixed in place, so nodes appear at the ends of the strings—the boundary conditions of the system, regulating the resonant frequencies in the strings. The resonance produced on a string instrument can be modeled in a physics lab using the apparatus shown in Figure 16.7.4.
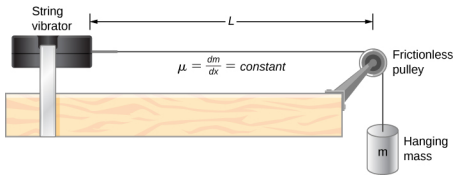
The lab setup shows a string attached to a string vibrator, which oscillates the string with an adjustable frequency f. The other end of the string passes over a frictionless pulley and is tied to a hanging mass. The magnitude of the tension in the string is equal to the weight of the hanging mass. The string has a constant linear density (mass per length) μ and the speed at which a wave travels down the string equals v=√FTμ=√mgμ Equation 16.7. The symmetrical boundary conditions (a node at each end) dictate the possible frequencies that can excite standing waves. Starting from a frequency of zero and slowly increasing the frequency, the first mode n = 1 appears as shown in Figure 16.7.5. The first mode, also called the fundamental mode or the first harmonic, shows half of a wavelength has formed, so the wavelength is equal to twice the length between the nodes λ1 = 2L. The fundamental frequency, or first harmonic frequency, that drives this mode is
f1=vλ1=v2L,
where the speed of the wave is v = √FTμ. Keeping the tension constant and increasing the frequency leads to the second harmonic or the n = 2 mode. This mode is a full wavelength λ2 = L and the frequency is twice the fundamental frequency:
f2=vλ2=vL=2f1.
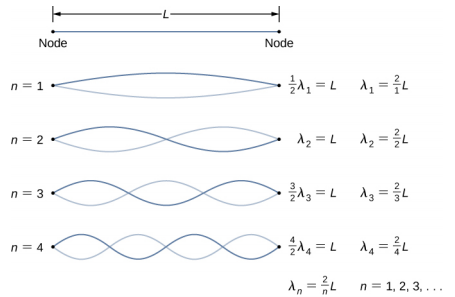
The next two modes, or the third and fourth harmonics, have wavelengths of λ3=23L and λ4=24L, driven by frequencies of f3 = 3v2L = 3f1 and f4 = 4v2L = 4f1. All frequencies above the frequency f1 are known as the overtones. The equations for the wavelength and the frequency can be summarized as:
λn=2nLn=1,2,3,4,5…
fn=nv2L=nf1n=1,2,3,4,5…
The standing wave patterns that are possible for a string, the first four of which are shown in Figure 16.7.5, are known as the normal modes, with frequencies known as the normal frequencies. In summary, the first frequency to produce a normal mode is called the fundamental frequency (or first harmonic). Any frequencies above the fundamental frequency are overtones. The second frequency of the n = 2 normal mode of the string is the first overtone (or second harmonic). The frequency of the n = 3 normal mode is the second overtone (or third harmonic) and so on.
The solutions shown as Equation ??? and Equation ??? are for a string with the boundary condition of a node on each end. When the boundary condition on either side is the same, the system is said to have symmetric boundary conditions. Equation ??? and Equation ??? are good for any symmetric boundary conditions, that is, nodes at both ends or antinodes at both ends.
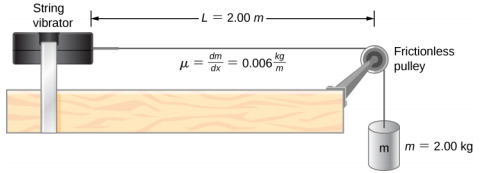
Consider a string of L = 2.00 m. attached to an adjustable-frequency string vibrator as shown in Figure 16.7.6. The waves produced by the vibrator travel down the string and are reflected by the fixed boundary condition at the pulley. The string, which has a linear mass density of μ = 0.006 kg/m, is passed over a frictionless pulley of a negligible mass, and the tension is provided by a 2.00-kg hanging mass. (a) What is the velocity of the waves on the string? (b) Draw a sketch of the first three normal modes of the standing waves that can be produced on the string and label each with the wavelength. (c) List the frequencies that the string vibrator must be tuned to in order to produce the first three normal modes of the standing waves.
Strategy
- The velocity of the wave can be found using v = √FTμ. The tension is provided by the weight of the hanging mass.
- The standing waves will depend on the boundary conditions. There must be a node at each end. The first mode will be one half of a wave. The second can be found by adding a half wavelength. That is the shortest length that will result in a node at the boundaries. For example, adding one quarter of a wavelength will result in an antinode at the boundary and is not a mode which would satisfy the boundary conditions. This is shown in Figure 16.7.7.
- Since the wave speed velocity is the wavelength times the frequency, the frequency is wave speed divided by the wavelength.

Solution
- Begin with the velocity of a wave on a string. The tension is equal to the weight of the hanging mass. The linear mass density and mass of the hanging mass are given: v=√FTμ=√mgμ=√(2kg)(9.8m/s)0.006kg/m=57.15m/s.
- The first normal mode that has a node on each end is a half wavelength. The next two modes are found by adding a half of a wavelength.
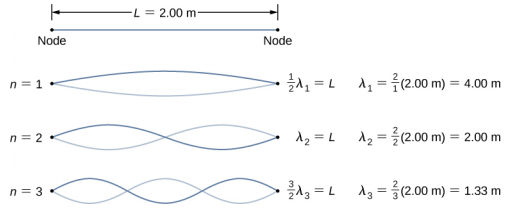
- The frequencies of the first three modes are found by using f = vwλ. f1=vwλ1=57.15m/s4.00m=14.29Hzf2=vwλ2=57.15m/s2.00m=28.58Hzf3=vwλ3=57.15m/s1.333m=42.87Hz
Significance
The three standing modes in this example were produced by maintaining the tension in the string and adjusting the driving frequency. Keeping the tension in the string constant results in a constant velocity. The same modes could have been produced by keeping the frequency constant and adjusting the speed of the wave in the string (by changing the hanging mass.)
Visit this simulation to play with a 1-D or 2-D system of coupled mass-spring oscillators. Vary the number of masses, set the initial conditions, and watch the system evolve. See the spectrum of normal modes for arbitrary motion. See longitudinal or transverse modes in the 1-D system.
The equations for the wavelengths and the frequencies of the modes of a wave produced on a string:
λn=2nLn=1,2,3,4,5…andfn=nv2L=nf1n=1,2,3,4,5…
were derived by considering a wave on a string where there were symmetric boundary conditions of a node at each end. These modes resulted from two sinusoidal waves with identical characteristics except they were moving in opposite directions, confined to a region L with nodes required at both ends. Will the same equations work if there were symmetric boundary conditions with antinodes at each end? What would the normal modes look like for a medium that was free to oscillate on each end? Don’t worry for now if you cannot imagine such a medium, just consider two sinusoidal wave functions in a region of length L, with antinodes on each end.
The free boundary conditions shown in the last Check Your Understanding may seem hard to visualize. How can there be a system that is free to oscillate on each end? In Figure 16.7.8 are shown two possible configuration of a metallic rods (shown in red) attached to two supports (shown in blue). In part (a), the rod is supported at the ends, and there are fixed boundary conditions at both ends. Given the proper frequency, the rod can be driven into resonance with a wavelength equal to length of the rod, with nodes at each end. In part (b), the rod is supported at positions one quarter of the length from each end of the rod, and there are free boundary conditions at both ends. Given the proper frequency, this rod can also be driven into resonance with a wavelength equal to the length of the rod, but there are antinodes at each end. If you are having trouble visualizing the wavelength in this figure, remember that the wavelength may be measured between any two nearest identical points and consider Figure 16.7.9.
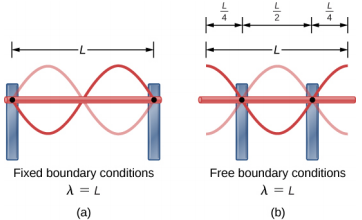

Note that the study of standing waves can become quite complex. In Figure 16.32(a), the n = 2 mode of the standing wave is shown, and it results in a wavelength equal to L. In this configuration, the n = 1 mode would also have been possible with a standing wave equal to 2L. Is it possible to get the n = 1 mode for the configuration shown in part (b)? The answer is no. In this configuration, there are additional conditions set beyond the boundary conditions. Since the rod is mounted at a point one quarter of the length from each side, a node must exist there, and this limits the possible modes of standing waves that can be created. We leave it as an exercise for the reader to consider if other modes of standing waves are possible. It should be noted that when a system is driven at a frequency that does not cause the system to resonate, vibrations may still occur, but the amplitude of the vibrations will be much smaller than the amplitude at resonance.
A field of mechanical engineering uses the sound produced by the vibrating parts of complex mechanical systems to troubleshoot problems with the systems. Suppose a part in an automobile is resonating at the frequency of the car’s engine, causing unwanted vibrations in the automobile. This may cause the engine to fail prematurely. The engineers use microphones to record the sound produced by the engine, then use a technique called Fourier analysis to find frequencies of sound produced with large amplitudes and then look at the parts list of the automobile to find a part that would resonate at that frequency. The solution may be as simple as changing the composition of the material used or changing the length of the part in question.
There are other numerous examples of resonance in standing waves in the physical world. The air in a tube, such as found in a musical instrument like a flute, can be forced into resonance and produce a pleasant sound, as we discuss in Sound.
At other times, resonance can cause serious problems. A closer look at earthquakes provides evidence for conditions appropriate for resonance, standing waves, and constructive and destructive interference. A building may vibrate for several seconds with a driving frequency matching that of the natural frequency of vibration of the building—producing a resonance resulting in one building collapsing while neighboring buildings do not. Often, buildings of a certain height are devastated while other taller buildings remain intact. The building height matches the condition for setting up a standing wave for that particular height. The span of the roof is also important. Often it is seen that gymnasiums, supermarkets, and churches suffer damage when individual homes suffer far less damage. The roofs with large surface areas supported only at the edges resonate at the frequencies of the earthquakes, causing them to collapse. As the earthquake waves travel along the surface of Earth and reflect off denser rocks, constructive interference occurs at certain points. Often areas closer to the epicenter are not damaged, while areas farther away are damaged.