
18.10: Fixed-Axis Rotation Introduction
- Page ID
- 7949

Check Your Understanding
10.1. a. 40.0 rev/s = 2\(pi\)(40.0) rad/s, \(\bar{\alpha} = \frac{\Delta \omega}{\Delta t} = \frac{2 \pi (40.0) − 0\; rad/s}{20.0\; s}\) = 2\(\pi\)(2.0) = 4.0 \(\pi\) rad/s2
b. Since the angular velocity increases linearly, there has to be a constant acceleration throughout the indicated time. Therefore, the instantaneous angular acceleration at any time is the solution to 4.0\(\pi\) rad/s2.
10.2. a. Using Equation 10.25, we have 7000 rpm = \(\frac{7000.0(2 \pi\; rad)}{60.0\; s}\) = 733.0 rad/s, $$\alpha = \frac{\omega - \omega_{0}}{t} = \frac{733.0\; rad/s}{10.0\; s} = 73.3\; rad/s^{2}\]
b. Using Equation 10.29, we have $$\omega^{2} = \omega_{0}^{2} + 2 \alpha \Delta \theta \Rightarrow \Delta \theta = \frac{\omega^{2} - \omega_{0}^{2}}{2 \alpha} = \frac{0 - (733.0\; rad/s)^{2}}{2(73.3\; rad/s^{2})} = 3665.2\; rad\]
10.3. The angular acceleration is \(\alpha = \frac{(5.0 − 0)\; rad/s}{20.0\; s}\) = 0.25 rad/s2. Therefore, the total angle that the boy passes through is $$\Delta \theta = \frac{\omega^{2} - \omega_{0}^{2}}{2 \alpha} = \frac{(5.0)^{2} - 0}{2(0.25)} = 50\; rad$$Thus, we calculate $$s = r \theta = (5.0\; m)(50.0\; rad) = 250.0\; m\]
10.4. The initial rotational kinetic energy of the propeller is $$K_{0} = \frac{1}{2} I \omega^{2} = \frac{1}{2} (800.0\; kg \cdotp m^{2})(4.0 \times 2 \pi\; rad/s)^{2} = 2.53 \times 10^{5}\; J \ldotp$$At 5.0 s the new rotational kinetic energy of the propeller is $$K_{f} = 2.03 \times 10^{5}\; J \ldotp$$and the new angular velocity is $$\omega = \sqrt{\frac{2(2.03 \times 10^{5}\; J)}{800.0\; kg \cdotp m^{2}}} = 22.53\; rad/s$$which is 3.58 rev/s.
10.5. Iparallel-axis = Icenter of mass + md2 = mR2 + mR2 = 2mR2
10.6. The angle between the lever arm and the force vector is 80°; therefore, r\(\perp\) = 100 m(sin 80°) = 98.5 m. The cross product \(\vec{\tau} = \vec{r} \times \vec{F}\) gives a negative or clockwise torque. The torque is then \(\tau = - r_{\perp} F\) = −98.5 m(5.0 x 105 N) = −4.9 x 107 N • m.
10.7. a. The angular acceleration is \(\alpha = \frac{20.0(2 \pi)\; rad/s − 0}{10.0 \; s}\) = 12.56 rad/s2. Solving for the torque, we have \(\sum_{i} \tau_{i} = I \alpha\) = (30.0 kg • m2)(12.56 rad/s2) = 376.80 N • m
b. The angular acceleration is \(\alpha = \frac{0 − 20.0(2 \pi)\; rad/s}{20.0\; s}\) = −6.28 rad/s2. Solving for the torque, we have \(\sum_{i} \tau_{i} = I \alpha\) = (30.0 kg • m2 )(−6.28 rad/s2) = −188.50 N • m
10.8. 3 MW
Conceptual Questions
1. The second hand rotates clockwise, so by the right-hand rule, the angular velocity vector is into the wall.
3. They have the same angular velocity. Points further out on the bat have greater tangential speeds.
5. Straight line, linear in time variable
7. Constant
9. The centripetal acceleration vector is perpendicular to the velocity vector.
11. a. Both; b. nonzero centripetal acceleration; c. both
13. The hollow sphere, since the mass is distributed further away from the rotation axis.
15. a. It decreases. b. The arms could be approximated with rods and the discus with a disk. The torso is near the axis of rotation so it doesn’t contribute much to the moment of inertia.
17. Because the moment of inertia varies as the square of the distance to the axis of rotation. The mass of the rod located at distances greater than L/2 would provide the larger contribution to make its moment of inertia greater than the point mass at \(\frac{L}{2}\).
19. Magnitude of the force, length of the lever arm, and angle of the lever arm and force vector
21. The moment of inertia of the wheels is reduced, so a smaller torque is needed to accelerate them.
23. Yes
25. |\(\vec{r}\)| can be equal to the lever arm but never less than the lever arm
27. If the forces are along the axis of rotation, or if they have the same lever arm and are applied at a point on the rod.
Problems
29. \(\omega = \frac{2 \pi\; rad}{45.0\; s}\) = 0.14 rad/s
31. a. \(\theta = \frac{s}{r} = \frac{3.0\; m}{1.5\; m}\) = 2.0 rad
b. \(\omega = \frac{2.0\; rad}{1.0\; s}\) = 2.0 rad/s
c. \(\frac{v^{2}}{r} = \frac{(3.0\; m/s)^{2}}{1.5\; m}\) = 6.0 m/s2.
33. The propeller takes only \(\Delta\)t = \(\frac{\Delta \omega}{\alpha} = \frac{0\; rad/s − 10.0(2 \pi)\; rad/s}{−2.0\; rad/s^{2}}\) = 31.4 s to come to rest, when the propeller is at 0 rad/s, it would start rotating in the opposite direction. This would be impossible due to the magnitude of forces involved in getting the propeller to stop and start rotating in the opposite direction.
35. a. \(\omega\) = 25.0(2.0 s) = 50.0 rad/s
b. \(\alpha = \frac{d \omega}{dt}\) = 25.0 rad/s2
37. a. \(\omega\) = 54.8 rad/s
b. t = 11.0 s
39. a. 0.87 rad/s2
b. \(\theta\) = 66,264 rad
41. a. \(\omega\) = 42.0 rad/s
b. \(\theta\) = 220 rad
c. vt = 42 m/s, at = 4.0 m/s2
43. a. \(\omega\) = 7.0 rad/s
b. \(\theta\) = 22.5 rad
c. at = 0.1 m/s
45. \(\alpha\) = 28.6 rad/s2.
47. r = 0.78 m
49. a. \(\alpha\) = −0.314 rad/s2
b. ac = 197.4 m/s2
c. a = \(\sqrt{a_{c}^{2} + a_{t}^{2}} = \sqrt{197.4^{2} + (−6.28)^{2}}\) = 197.5 m/s2, \(\theta\) = tan−1 \(\frac{−6.28}{197.4}\) = −1.8° in the clockwise direction from the centripetal acceleration vector
51. ma = 40.0 kg(5.1 m/s2) = 204.0 N
The maximum friction force is \(\mu_{S}\)N = 0.6(40.0 kg)(9.8 m/s2) = 235.2 N so the child does not fall off yet.
53. $$\begin{split} v_{t} & = r \omega = 1.0(2.0t)\; m/s \\ a_{c} & = \frac{v_{t}^{2}}{r} = \frac{(2.0t)^{2}}{1.0\; m} = 4.0t^{2}\; m/s^{2} \\ a_{t} (t) & = r \alpha (t) = r \frac{d \omega}{dt} = 1.0\; m(2.0) = 2.0\; m/s^{2} \ldotp \end{split}$$Plotting both accelerations gives
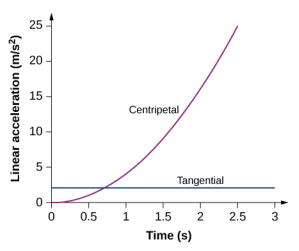
The tangential acceleration is constant, while the centripetal acceleration is time dependent, and increases with time to values much greater than the tangential acceleration after t = 1s. For times less than 0.7 s and approaching zero the centripetal acceleration is much less than the tangential acceleration.
55. a. K = 2.56 x 1029 J
b. K = 2.68 x 1033 J
57. K = 434.0 J
59. a. vf = 86.5 m/s
b. The rotational rate of the propeller stays the same at 20 rev/s.
61. K = 3.95 x 1042 J
63. a. I = 0.315 kg • m2
b. K = 621.8 J
65. I = \(\frac{7}{36}\) mL2
67. v = 7.14 m/s.
69. \(\theta\) = 10.2°
71. F = 30 N
73. a. 0.85 m(55.0 N) = 46.75 N • m
b. It does not matter at what height you push.
75. m2 = \(\frac{4.9\; N \cdotp m}{9.8(0.3\; m)}\) = 1.67 kg
77. \(\tau_{net}\) = −9.0 N • m + 3.46 N • m + 0 − 3.28 N • m = −8.82 N • m
79. \(\tau\) = 5.66 N • m
81. \(\sum \tau\) = 57.82 N • m
83. \(\vec{r} \times \vec{F}\) = 4.0 \(\hat{i}\) + 2.0 \(\hat{j}\) − 16.0 \(\hat{k}\) N • m
85. a. \(\tau\) = (0.280 m)(180.0 N) = 50.4 N • m
b. \(\alpha\) = 17.14 rad/s2
c. \(\alpha\) = 17.04 rad/s2
87. \(\tau\) = 8.0 N • m
89. \(\tau\) = −43.6 N • m
91. a. \(\alpha\) = 1.4 x 10−10 rad/s2
b. \(\tau\) = 1.36 x 1028 N • m
c. F = 2.1 x 1021 N
93. a = 3.6 m/s2
95. a. a = r\(\alpha\) = 14.7 m/s2
b. a = \(\frac{L}{2} \alpha\) = \(\frac{3}{4}\)g
97. \(\tau = \frac{P}{\omega} = \frac{2.0 \times 10^{6}\; W}{2.1\; rad/s}\) = 9.5 x 105 N • m
99. a. K = 888.50 J
b. \(\Delta \theta\) = 294.6 rev
101. a. I = 114.6 kg • m2
b. P = 104,700 W
103. v = L\(\omega\) = \(\sqrt{3Lg}\)
105. a. a = 5.0 m/s2
b. W = 1.25 N • m
Additional Problems
107. \(\Delta\)t = 10.0 s
109. a. 0.06 rad/s2
b. \(\theta\) = 105.0 rad
111. s = 405.26 m
113. a. I = 0.363 kg • m2
b. I = 2.34 kg • m2
115. \(\omega =\sqrt{\frac{5.36\; J}{4.4\; kg \cdotp m^{2}}}\) = 1.10 rad/s
117. F = 23.3 N
119. \(\alpha = \frac{190.0\; N \cdotp m}{2.94\; kg \cdotp m^{2}}\) = 64.4 rad/s2
Challenge Problems
121. a. \(\omega\) = 2.0t − 1.5t2
b. \(\theta\) = t2 − 0.5t3
c. \(\theta\) = −400.0 rad
d. the vector is at −0.66(360°) = −237.6°
123. I = \(\frac{2}{5}\)mR2
125. a. \(\omega\) = 8.2 rad/s
b. \(\omega\) = 8.0 rad/s
Contributors and Attributions
Samuel J. Ling (Truman State University), Jeff Sanny (Loyola Marymount University), and Bill Moebs with many contributing authors. This work is licensed by OpenStax University Physics under a Creative Commons Attribution License (by 4.0).