
18.11: Angular Momentum
- Page ID
- 7950

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Check Your Understanding
11.1. a. \(\mu_{S} \geq \frac{\tan \theta}{1 + \left(\dfrac{mr^{2}}{I_{CM}}\right)}\); inserting the angle and noting that for a hollow cylinder ICM = mr2, we have \(\mu_{S} \geq \frac{\tan 60^{o}}{1 + \left(\dfrac{mr^{2}}{mr^{2}}\right)} = \frac{1}{2} \tan 60^{o}\) = 0.87; we are given a value of 0.6 for the coefficient of static friction, which is less than 0.87, so the condition isn’t satisfied and the hollow cylinder will slip; b. The solid cylinder obeys the condition \(\mu_{S} \geq \frac{1}{3} \tan \theta = \frac{1}{3} \tan 60^{o}\) = 0.58. The value of 0.6 for \(\mu_{S}\) satisfies this condition, so the solid cylinder will not slip.
11.2. From the figure, we see that the cross product of the radius vector with the momentum vector gives a vector directed out of the page. Inserting the radius and momentum into the expression for the angular momentum, we have $$\vec{l} = \vec{r} \times \vec{p} = (0.4\; m\; \hat{i}) \times [1.67 \times 10^{−27}\; kg(4.0 \times 10^{6}\; m/s) \hat{j}] = 2.7 \times 10^{−21}\; kg \cdotp m^{2}/s\; \hat{k}\]
11.3. Isphere = \(\frac{2}{5}\)mr2, Icylinder = \(\frac{1}{2}\)mr2; Taking the ratio of the angular momenta, we have: \(\frac{L_{cylinder}}{L_{sphere}} = \frac{I_{cylinder} \omega_{0}}{I_{sphere} \omega_{0}} = \frac{\frac{1}{2} mr^{2}}{\frac{2}{5} mr^{2}} = \frac{5}{4}\). Thus, the cylinder has 25% more angular momentum. This is because the cylinder has more mass distributed farther from the axis of rotation.
11.4. Using conservation of angular momentum, we have I(4.0 rev/min) = 1.25I\(\omega_{f}\), \(\omega_{f}\) = \(\frac{1.0}{1.25}\)(4.0 rev/min) = 3.2 rev/min
11.5. The Moon’s gravity is 1/6 that of Earth’s. By examining Equation 11.12, we see that the top’s precession frequency is linearly proportional to the acceleration of gravity. All other quantities, mass, moment of inertia, and spin rate are the same on the Moon. Thus, the precession frequency on the Moon is \(\omega_{P}\)(Moon) = \(\frac{1}{6} \omega_{P}\)(Earth) = \(\frac{1}{6}\)(5.0 rad/s) = 0.83 rad/s.
Conceptual Questions
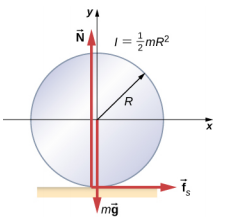
1. No, the static friction force is zero.
3. The wheel is more likely to slip on a steep incline since the coefficient of static friction must increase with the angle to keep rolling motion without slipping.
5. The cylinder reaches a greater height. By Equation 11.20, its acceleration in the direction down the incline would be less.
7. All points on the straight line will give zero angular momentum, because a vector crossed into a parallel vector is zero.
9. The particle must be moving on a straight line that passes through the chosen origin.
11. Without the small propeller, the body of the helicopter would rotate in the opposite sense to the large propeller in order to conserve angular momentum. The small propeller exerts a thrust at a distance R from the center of mass of the aircraft to prevent this from happening.
13. The angular velocity increases because the moment of inertia is decreasing.
15. More mass is concentrated near the rotational axis, which decreases the moment of inertia causing the star to increase its angular velocity.
17. A torque is needed in the direction perpendicular to the angular momentum vector in order to change its direction. These forces on the space vehicle are external to the container in which the gyroscope is mounted and do not impart torques to the gyroscope’s rotating disk.
Problems
19. vCM = R\(\omega \Rightarrow \omega\) = 66.7 rad/s
21. \(\alpha\) = 3.3 rad/s2
23. ICM = \(\frac{2}{5}\)mr2, aCM = 3.5 m/s2; x = 15.75 m
25. Positive is down the incline plane; $$a_{CM} = \frac{mg \sin \theta}{m + \left(\dfrac{I_{CM}}{r^{2}}\right)} \Rightarrow I_{CM} = r^{2} \Bigg[\frac{mg \sin 30}{a_{CM}} − m \Bigg],$$$$x − x_{0} = v_{0} t − \frac{1}{2} a_{CM} t^{2} \Rightarrow a_{CM} = 2.96\; m/s^{2},$$$$I_{CM} = 0.66\; mr^{2}\]
27. \(\alpha\) = 67.9 rad/s2, (aCM)x = 1.5 m/s2
29. W = −1080.0 J
31. Mechanical energy at the bottom equals mechanical energy at the top; $$\frac{1}{2} mv_{0}^{2} + \frac{1}{2} \left(\dfrac{1}{2} mr^{2}\right) \left(\dfrac{v_{0}}{r}\right)^{2} = mgh \Rightarrow h = \frac{1}{g} \left(\dfrac{1}{2} + \dfrac{1}{4}\right) v_{0}^{2},$$h = 7.7 m, so the distance up the incline is 22.5 m .
33. Use energy conservation $$\begin{split} \frac{1}{2} mv_{0}^{2} + \frac{1}{2} I_{Cyl} \omega_{0}^{2} & = mgh_{Cyl}, \\ \frac{1}{2} mv_{0}^{2} + \frac{1}{2} I_{Sph} \omega_{0}^{2} & = mgh_{Sph} \ldotp \end{split} $$Subtracting the two equations, eliminating the initial translational energy, we have $$\frac{1}{2} I_{Cyl} \omega_{0}^{2} − \frac{1}{2} I_{Sph} \omega_{0}^{2} = mg(h_{Cyl} − h_{Sph}),$$$$\frac{1}{2} mr^{2} \left(\dfrac{v_{0}}{r}\right)^{2} − \frac{1}{2} \left(\dfrac{2}{3}\right) mr^{2} \left(\dfrac{v_{0}}{r}\right)^{2} = mg(h_{Cyl} − h_{Sph}),$$$$\frac{1}{2} v_{0}^{2} − \frac{1}{2} \left(\dfrac{2}{3}\right) v_{0}^{2} = g(h_{Cyl} − h_{Sph}),$$$$h_{Cyl} − h_{Sph} = \frac{1}{g} \left(\dfrac{1}{2} − \dfrac{1}{3}\right) v_{0}^{2} = \frac{1}{9.8\; m/s^{2}} \left(\dfrac{1}{6}\right) (5.0\; m/s)^{2} = 0.43\; m \ldotp$$Thus, the hollow sphere, with the smaller moment of inertia, rolls up to a lower height of 1.0 − 0.43 = 0.57 m.
35. The magnitude of the cross product of the radius to the bird and its momentum vector yields rp sin \(\theta\), which gives r sin \(\theta\) as the altitude of the bird h. The direction of the angular momentum is perpendicular to the radius and momentum vectors, which we choose arbitrarily as \(\hat{k}\), which is in the plane of the ground: $$\vec{L} = \vec{r} \times \vec{p} = hmv\; \hat{k} = (300.0\; m)(2.0\; kg)(20.0\; m/s)\; \hat{k} = 12,000.0\; kg \cdotp m^{2}/s\; \hat{k}\]
37. a. \(\vec{l}\) = 45.0 kg • m2/s \(\hat{k}\)
b. \(\vec{\tau}\) = 10.0 N • m \(\hat{k}\)
39. a. \(\vec{l}_{1}\) = −0.4 kg • m2/s \(\hat{k}\), \(\vec{l}_{2} = \vec{l}_{4}\) = 0, \(\vec{l}_{3}\) = 1.35 kg • m2/s \(\hat{k}\)
b. \(\vec{L}\) = 0.95 kg • m2/s \(\hat{k}\)
41. a. L = 1.0 x 1011 kg • m2/s
b. No, the angular momentum stays the same since the cross-product involves only the perpendicular distance from the plane to the ground no matter where it is along its path.
43. a. \(\vec{v} = −gt\; \hat{j}, \vec{r}_{\perp} = −d;\ \hat{i}, \vec{l} = mdgt\; \hat{k}\)
b. \(\vec{F} = −mg\; \hat{j}, \Sigma \vec{\tau} = dmg\; \hat{k}\)
c. Yes
45. a. mgh = \(\frac{1}{2}\)m(r\(\omega\))2 + \(\frac{1}{2} \left(\dfrac{2}{5}\right) mr^{2} \omega^{2}\); \(\omega\) = 51.2 rad/s; L = 16.4 kg • m2/s
b. \(\omega\) = 72.5 rad/s; L = 23.2 kg • m2/s
47. a. I = 720.0 kg • m2; \(\alpha\) = 4.20 rad/s2; \(\omega\)(10 s) = 42.0 rad/s; L = 3.02 x 104 kg • m2/s; \(\omega\)(20 s) = 84.0 rad/s
b. \(\tau\) = 3.03 x 103 N • m
49. a. L = 1.131 x 107 kg • m2/s
b. \(\tau\) = 3.77 x 104 N • m
51. \(\omega\) = 28.6 rad/s \(\Rightarrow\) L = 2.6 kg • m2/s
53. $$L_{f} = \frac{2}{5} M_{S} (3.5 \times 10^{3}\; km)^{2} \frac{2 \pi}{T_{f}},$$$$(7.0 \times 10^{5}\; km)^{2} \frac{2 \pi}{28\; days} = (3.5 \times 10^{3}\; km)^{2} \frac{2 \pi}{T_{f}}$$$$T_{f} \Rightarrow = 28\; days \frac{(3.5 \times 10^{3}\; km)^{2}}{(7.0 \times 10^{5}\; km)^{2}} = 7.0 \times 10^{−4}\; day = 60.5\; s\]
55. ff = 2.1 rev/s \(\Rightarrow\) f0 = 0.5 rev/s
57. rPmvP = rAmvA \(\Rightarrow\) vP = 18.3 km/s
59. a. Idisk = 5.0 x 10−4 kg • m2, Ibug = 2.0 x 10−4 kg • m2, (Idisk + Ibug)\(\omega_{1}\) = Idisk\(\omega_{2}\), \(\omega_{2}\) = 14.0 rad/s
b. \(\Delta\)K = 0.014 J
c. \(\omega_{3}\) = 10.0 rad/s back to the original value
d. \(\frac{1}{2}\)(Idisk + Ibug)\(\omega_{3}^{2}\) = 0.035 J back to the original value
e. Work of the bug crawling on the disk
61. Li = 400.0 kg • m2s , Lf = 500.0 kg • m2\(\omega\), \(\omega\) = 0.80 rad/s
63. I0 = 340.48 kg • m2, If = 268.8 kg • m2, \(\omega_{f}\) = 25.33 rpm
65. a. L = 280 kg • m2/s , If = 89.6 kg • m2, \(\omega_{f}\) = 3.125 rad/s
b. Ki = 437.5 J, Kf = 437.5 J
67. Moment of inertia in the record spin: I0 = 0.5 kg • m2, If = 1.1 kg • m2, \(\omega_{f} = \frac{I_{0}}{I_{f}} \omega_{0} \Rightarrow \) ff = 155.5 rev/min
69. Her spin rate in the air is: ff = 2.0 rev/s; She can do four flips in the air.
71. Moment of inertia with all children aboard: I0 = 2.4 x 105 kg • m2; If = 1.5 x 105 kg • m2; ff = 0.3 rev/s
73. I0 = 1.00 x 1010 kg • m2, If = 9.94 x 109 kg • m2, ff = 3.32 rev/min
75. I = 2.5 x 10−3 kg • m2, \(\omega_{P}\) = 0.78 rad/s
77. a. LEarth = 7.06 x 1033 kg • m2/s, \(\Delta\)L = 5.63 x 1033 kg • m2/s
b. \(\tau\) = 1.7 x 1022 N • m
c. The two forces at the equator would have the same magnitude but different directions, one in the north direction and the other in the south direction on the opposite side of Earth. The angle between the forces and the lever arms to the center of Earth is 90°, so a given torque would have magnitude \(\tau\) = FRE sin 90° = FRE. Both would provide a torque in the same direction: \(\tau\) = 2FRE \(\Rightarrow\) F = 1.3 x 1015 N
Additional Problems
79. aCM = − \(\frac{3}{10}\)g, v2 = v02 + 2aCMx \(\Rightarrow\) v2 = (7.0 m/s)2 − 2 \(\left(\dfrac{3}{10}g\right)\)x, v2 = 0 \(\Rightarrow\) x = 8.34 m
b. t = \(\frac{v − v_{0}}{a_{CM}}\), v = v0 + aCMt \(\Rightarrow\) t = 2.38 s; The hollow sphere has a larger moment of inertia, and therefore is harder to bring to a rest than the marble, or solid sphere. The distance traveled is larger and the time elapsed is longer.
81. a. W = −500.0 J
b. K + Ugrav = constant, 500 J + 0 = 0 + (6.0 kg)(9.8 m/s2)h, h = 8.5 m, d = 17.0 m; The moment of inertia is less for the hollow sphere, therefore less work is required to stop it. Likewise it rolls up the incline a shorter distance than the hoop.
83. a. \(\tau\) = 34.0 N • m
b. l = mr2\(\omega \Rightarrow \omega\) = 3.6 rad/s
85. a. dM = 3.85 x 108 m average distance to the Moon; orbital period 27.32d = 2.36 x 106 s; speed of the Moon \(\frac{2 \pi 3.85 \times 10^{8}\; m}{2.36 \times 10^{6}\; s}\) = 1.0 x 103 m/s; mass of the Moon 7.35 x 1022 kg, L = 2.90 x 1034 kgm2/s
b. Radius of the Moon 1.74 x 106 m; the orbital period is the same as (a): \(\omega\) = 2.66 x 10−6 rad/s, L = 2.37 x 1029 kg • m2/s; The orbital angular momentum is 1.22 x 105 times larger than the rotational angular momentum for the Moon.
87. I = 0.135 kg • m2, \(\alpha\) = 4.19 rad/s2, \(\omega = \omega_{0} + \alpha t\), \(\omega\)(5 s) = 21.0 rad/s, L = 2.84 kg • m2/s, \(\omega\)(10 s) = 41.9 rad/s, L = 5.66 kg • m/s2
89. In the conservation of angular momentum equation, the rotation rate appears on both sides so we keep the (rev/min) notation as the angular velocity can be multiplied by a constant to get (rev/min): Li = −0.04 kg • m2(300.0 rev/min), Lf = (0.08 kg • m2)ff \(\Rightarrow\) ff = −150.0 rev/min clockwise
91. I0\(\omega_{0}\) = If\(\omega_{f}\), I0 = 6120.0 kg • m2, If = 1180.0 kg • m2, \(\omega_{f}\) = 31.1 rev/min
93. Li = 1.00 x 107 kg • m2/s, If = 2.025 x 105 kg • m2, \(\omega_{f}\) = 7.86 rev/s
Challenge Problems
95. Assume the roll accelerates forward with respect to the ground with an acceleration a′. Then it accelerates backwards relative to the truck with an acceleration (a − a′).
Also, R\(\alpha\) = a − a′, I = \(\frac{1}{2}\)mR2, \(\Sigma\)Fx = fs = ma′, \(\Sigma \tau\) = fsR = I\(\alpha\) = I\(\frac{a − a′}{R}\), fs = \(\frac{I}{R^{2}}\)(a − a′) = \(\frac{1}{2}\)m(a − a′)
Solving for a′: fs = \(\frac{1}{2}\)m(a − a′), a′ = \(\frac{a}{3}\), x − x0 = v0t + \(\frac{1}{2}\)at2, d = \(\frac{1}{3}\)at2, t = \(\sqrt{\frac{3d}{a}}\), therefore, s = 1.5d
97. a. The tension in the string provides the centripetal force such that T sin \(\theta\) = mr\(\perp\)\(\omega^{2}\). The component of the tension that is vertical opposes the gravitational force such that T cos \(\theta\) = mg. This gives T = 5.7 N. We solve for r\(\perp\) = 0.16 m. This gives the length of the string as r = 0.32 m. At \(\omega\) = 10.0 rad/s, there is a new angle, tension, and perpendicular radius to the rod. Dividing the two equations involving the tension to eliminate it, we have \(\frac{\sin \theta}{\cos \theta} = \frac{(0.32\; m\; \sin \theta) \omega^{2}}{g} \Rightarrow \frac{1}{\cos \theta} = \frac{(0.32\; m) \omega^{2}}{g}\); cos \(\theta\) = 0.31 \(\Rightarrow \theta\) = 72.2°
b. linitial = 0.08 kg • m2/s, lfinal = 0.46 kg• m2/s
c. No, the cosine of the angle is inversely proportional to the square of the angular velocity, therefore in order for \(\theta\) → 90°, \(\omega\) → ∞. The rod would have to spin infinitely fast.
Contributors and Attributions
Samuel J. Ling (Truman State University), Jeff Sanny (Loyola Marymount University), and Bill Moebs with many contributing authors. This work is licensed by OpenStax University Physics under a Creative Commons Attribution License (by 4.0).