
3.6: Exercises



- Last updated
- Nov 5, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Exercise 3.6.1
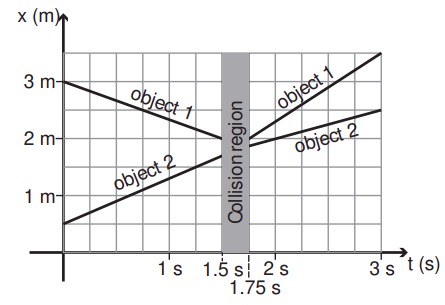
This figure shows the position vs. time graph for two objects before and after they collide. Assume that they form an isolated system.
- What are the velocities of the two objects before and after the collision? (Hint: you will get a more accurate result if you choose the initial and final times where the lines go exactly through a point on the grid shown.)
- Given the result in (a), what is the ratio of the inertias of the two objects?
Exercise 3.6.2
A car and a truck collide on a very slippery highway. The car, with a mass of 1600 kg, was initially moving at 50 mph. The truck, with a mass of 3000 kg, hit the car from behind at 65 mph. Assume the two vehicles form an isolated system in what follows.
- If, immediately after the collision, the vehicles separate and the truck’s velocity is found to be 55 mph in the same direction it was going, how fast (in miles per hour) is the car moving?
- If instead the vehicles end up stuck together, what will be their common velocity immediately after the collision?
Exercise 3.6.3
A 4-kg gun fires a 0.012-kg bullet at a 3-kg block of wood that is initially at rest. The bullet is embedded in the block, and they move together, immediately after the impact, with a velocity of 3.5 m/s.
- What was the velocity of the bullet just before impact?
- In order to shoot a bullet at this speed, what must have been the recoil speed of the gun?
Exercise 3.6.4
A 2-kg object, moving at 1 m/s, collides with a 1-kg object that is initially at rest. After the collision, the two objects are found to move away from each other at 1 m/s. Assume they form an isolated system.
- What are their actual final velocities in the Earth reference frame?
- What is the velocity of the center of mass of this system? Does it change as a result of the collision?
Exercise 3.6.5
Imagine you are stranded on a frozen lake (that means no friction—no traction!), with just a bow and a quiver of arrows. Each arrow has a mass of 0.02 kg, and with your bow can shoot them at a speed of 90 m/s (relative to you—but you might as well assume that this is the arrow’s velocity relative to the earth, since, as you will see, your recoil velocity will end up being pretty small anyway). So you decide to use them to propel yourself back to shore.
- Suppose your mass (plus the bow and arrows) is 70 kg. When you shoot an arrow, starting from rest, with what speed do you recoil?
- Suppose you try to be really clever, and tie a string to the arrow, with the other end of the string tied around your waist. The idea is to get the arrow to pull you forward. Will this work? (Hint: remember part (a). What will happen when the string becomes taut?)
Exercise 3.6.6
An object’s position function is given by x1(t)=5+10t (with x1 in meters if t is in seconds). A second object’s position function is x2(t)=5−6t.
- If the first object’s mass is 1/3 the mass of the second one, what is the position of the system’s center of mass as a function of time?
- Under the same assumption, what is the velocity of the system’s center of mass?