
9.3: The Cross Product and Rotational Quantities



- Last updated
- Nov 5, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
The cross, or vector, product of two vectors →A and →B is denoted by →A×→B. It is defined as a vector perpendicular to both →A and →B (that is to say, to the plane that contains them both), with a magnitude given by
|→A×→B|=ABsinθ
where A and B are the magnitudes of →A and →B, respectively, and θ is the angle between →A and →B, when they are drawn either with the same origin or tip-to-tail.
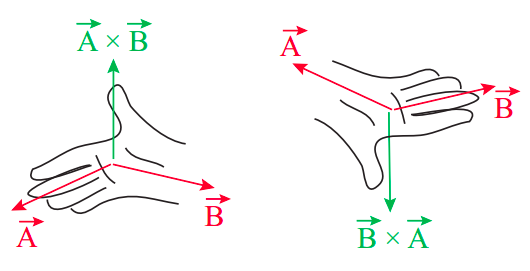
The specific direction of →A×→B depends on the relative orientation of the two vectors. Basically, if →B is counterclockwise from →A, when looking down on the plane in which they lie, assuming they are drawn with a common origin, then →A×→B points upwards from that plane; otherwise, it points downward (into the plane). One can also use the so-called right-hand rule, illustrated in Figure 9.3.1 to figure out the direction of →A×→B. Note that, by this definition, the direction of →A×→B is the opposite of the direction of →B×→A (as also illustrated in Figure 9.3.1). Hence, the cross-product is non-commutative: the order of the factors makes a difference.
→A×→B=−→B×→A
It follows from Equation (???) that the cross-product of any vector with itself must be zero. In fact, according to Equation (???), the cross product of any two vectors that are parallel to each other is zero, since in that case θ = 0, and sin0 = 0. In this respect, the cross product is the opposite of the dot product that we introduced in Chapter 7: it is maximum when the vectors being multiplied are orthogonal, and zero when they are parallel. (And, of course, the result of →A×→B is a vector, whereas →A⋅→B is a scalar.)
Besides not being commutative, the cross product also does not have the associative property of ordinary multiplication: →A×(→B×→C) is different from (→A×→B)×→C. You can see this easily from the fact that, if →A=→B, the second expression will be zero, but the first one generally will be nonzero (since →A×→C is not parallel, but rather perpendicular to →A).
In spite of these oddities, the cross product is extremely useful in physics. We will use it to define the angular momentum vector →L of a particle, relative to a point O, as follows:
→L=→r×→p=m→r×→v
where →r is the position vector of the particle, relative to the point O. This definition gives us a constant vector for a particle moving on a straight line, as discussed in the previous section: the magnitude of →L , according to Equation (???) will be mrvsinθ, which, as shown in Figure 9.2.1, does not change as the particle moves. As for the direction, it is always perpendicular to the plane containing →r and →v (the plane of the paper, in Figure 9.2.1), and if you imagine moving →v to point O, keeping it parallel to itself, and apply the right-hand rule, you will see that →L in Figure 9.2.1, should point into the plane of the paper at all times.
To see how the definition (???) works for a particle moving in a circle, consider again the situation shown in Figure 8.4.2 in the previous chapter, but now extend it to three dimensions, as in Figure 9.3.2, on the next page. It is straightforward to verify that, for the direction of motion shown, the cross product →r×→v will always point upwards, along the positive z axis. Furthermore, since →r and →v always stay perpendicular, the magnitude of →L , by Equation (???), will always be |→L|=mR|→v|.Taking note of I=mR2 and of Equation (8.4.12), we see we have then
|→L|=(mR2)|→v|R=I|ω|
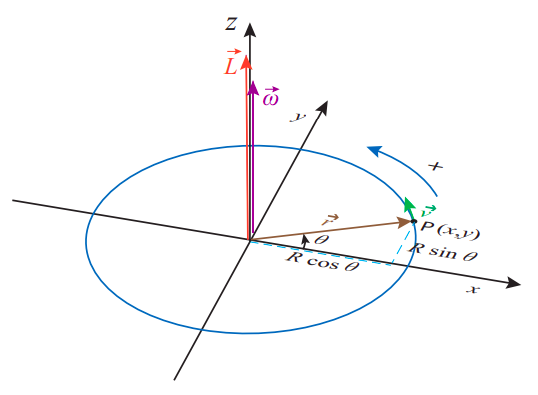
This suggests that we should define the angular velocity vector, →ω, as a vector of magnitude |ω|, pointing along the positive z axis if the motion in the x-y plane is counterclockwise as seen from above (and in the opposite direction otherwise). Then this will hold as a vector equation:
→L=I→ω.
It may seem a very strange choice to have the angular velocity point along the z axis, when the particle is moving in the x-y plane, but in a certain way it makes sense. Suppose the particle is moving with constant angular velocity: the directions of →r and →v are constantly changing, but →ω is pointing along the positive z direction, which does remain fixed throughout
There are some other neat things we can do with →ω as defined above. Consider the cross product →ω×→r. Inspection of Figure 9.3.2 and of Equation (8.4.12) shows that this is nothing other than the ordinary velocity vector, →v:
We can also take the derivative of →ω to obtain the angular acceleration vector →α, so that Equation (8.4.9) will hold as a vector equation:
→α=lim
For the motion depicted in Figure \PageIndex{2}, the vector \vec \alpha will point along the positive z axis if the vector \vec \omega is growing (which means the particle is speeding up), and along the negative z axis if \vec \omega is decreasing.
One important property the cross product does have is the distributive property with respect to the sum:
(\vec{A}+\vec{B}) \times \vec{C}=\vec{A} \times \vec{C}+\vec{B} \times \vec{C} \label{eq:9.16} .
This, it turns out, is all that’s necessary in order to be able to apply the product rule of differentiation to calculate the derivative of a cross product; you just have to be careful not to change the order of the factors in doing so. We can then take the derivative of both sides of Equation (\ref{eq:9.14}) to get an expression for the acceleration vector:
\begin{align} \vec{a}=\frac{d \vec{v}}{d t} &=\frac{d \vec{\omega}}{d t} \times \vec{r}+\vec{\omega} \times \frac{d \vec{r}}{d t} \nonumber \\ &=\vec{\alpha} \times \vec{r}+\vec{\omega} \times \vec{v} \label{eq:9.17} . \end{align}
The first term on the right-hand side, \vec{\alpha} \times \vec{r}, lies in the x-y plane, and is perpendicular to \vec r; it is, therefore, tangential to the circle. In fact, looking at its magnitude, it is clear that this is just the tangential acceleration vector, which I introduced (as a scalar) in Equation (8.4.13).
As for the second term in (\ref{eq:9.17}), \vec \omega \times \vec v, noting that \vec \omega and \vec v are always perpendicular, it is clear its magnitude is |\omega||\vec{v}|=R \omega^{2}=v^{2} / R (making use of Equation (8.4.12) again). This is just the magnitude of the centripetal acceleration we studied in the previous chapter (section 8.4). Also, using the right-hand rule in Figure \PageIndex{2}, you can see that \vec{\omega} \times \vec{v} always points inwards, towards the center of the circle; that is, along the direction of −\vec r. Putting all of this together, we can write this vector as just −\omega^2 \vec r, and the whole acceleration vector as the sum of a tangential and a centripetal (radial) component, as follows:
To conclude this section, let me return to the angular momentum vector, and ask the question of whether, in general, the angular momentum of a rotating system, defined as the sum of Equation (\ref{eq:9.11}) over all the particles that make up the system, will or not satisfy the vector equation \vec L = I\omega. We have seen that this indeed works for a particle moving in a circle. It will, therefore, also work for any object that is essentially flat, and rotating about an axis perpendicular to it, since in that case all its parts are just moving in circles around a common center. This was the case for the thin rod we considered in connection with Figure 9.2.3 in the previous subsection.
However, if the system is a three-dimensional object rotating about an arbitrary axis, the result \vec L = I\vec \omega does not generally hold. The reason is, mathematically, that the moment of inertia I is defined (Equation (9.1.3)) in terms of the distances of the particles to an axis, whereas the angular momentum involves the particle’s distance to a point. For particles at different “heights” along the axis of rotation, these quantities are different. It can be shown that, in the general case, all we can say is that L_z = I\omega_z, if we call z the axis of rotation and calculate \vec L relative to a point on that axis.
On the other hand, if the axis of rotation is an axis of symmetry of the object, then \vec L has only a z component, and the result \vec L = I\vec \omega holds as a vector equation. Most of the systems we will consider this semester will be covered under this clause, or under the “essentially flat” clause mentioned above.
In what follows we will generally assume that I has only a z component, and we will drop the subscript z in the equation L_z = I\omega_z, so that L and \omega will not necessarily be the magnitudes of their respective vectors, but numbers that could be positive or negative, depending on the direction of rotation (clockwise or counterclockwise). This is essentially the same convention we used for vectors in one dimension, such as \vec a or \vec p, in the early chapters; it is fine for all the cases in which the (direction of the) axis of rotation does not change with time, which are the only situations we will consider this semester.